Курсовая работа: Разработка системы автоматического контроля и регулирования расхода вентиляционного воздуха
2.1 Установка дифманометра
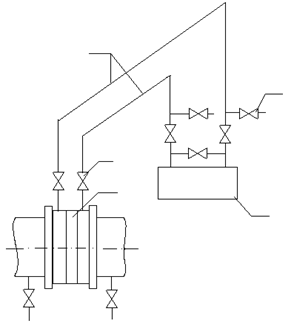
Для правильной работы расходомерного комплекта необходима правильная установка его компонентов. Схема установки дифманометра относительно СУ приведена на рисунке 2.1.1. В нашем случае при измерении расхода воздуха, в соответствии с заданием на курсовую работу, следует установить дифманометр 1 выше сужающего устройства 2. Для передачи давления от сужающего устройства к дифманометру используется система соединительных линий 3. Внутренний диаметр соединительных трубок рекомендуется принимать 8 – 12 мм. Длина импульсных линий не должна превышать 50 м. Увеличение диаметра и длины трубок приводит к росту запаздывания в системе, перерасходу материала; уменьшение диаметра – к возможному засорению трубок.
Необходимо выполнить уклон 1:10 на всем продолжении горизонтальных участков импульсной линии 3 в сторону отборного устройства. Это предотвращает попадание конденсата в манометр, если газ влажный, т. к. он имеет возможность стекать в объект.
Для продувки системы на импульсных линиях устанавливаются продувочные вентили 5. Конденсат из трубопровода удаляется в дренаж через запорные вентили 4.
|
|
|
|
|
|
|
|
2.2 Датчик давления «Сапфир – М»
Датчики давления «Сапфир-М» с цифровой микропроцессорной обработкой сигнала (ЦО) предназначены для измерения разных видов давления и преобразования измеренных величин в унифицированный электрический сигнал постоянного тока.
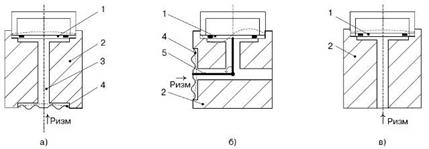
Рисунок 2.2.1 –Схемы, лежащие в основе конструкций измерительных блоков датчиков «Сапфир-М»
1 – сенсор; 2 – корпус измерительного блока; 3 – внутренняя полость измерительного блока; 4 – разделительная мембрана; 5 – дополнительный рычаг.
Датчик давления «Сафір М» (ЦО) состоит из двух основных блоков: измерительного (ИБ) и нормирующего (НБ). Основу ИБ составляет сенсорный элемент, разделительная мембрана и корпус измерительного блока.
Корректирующие коэффициенты определяются в заводских условиях и, также как и текущие
настройки и регулировки, хранятся в энергонезависимой памяти электронного модуля. Колодка и электронный модуль размещены в отдельных отсеках корпуса, разделенных герметичной перегородкой. Электронный модуль запломбирован. Корпус НБ с двух сторон защищен съемными крышками.
При монтаже датчика в различных положениях для обеспечения лучшего обзора ЖКИ и удобства пользования кнопками встроенного пульта, предусмотрена возможность поворота индикаторной платы на углы 90°, 180° или минус 90° по отношению к вертикальной оси датчика.
2.3 Прибор вторичный ИП-6-ТК
Прибор измерительный цифровой ИП-6-ТК предназначен для измерения и преобразования электрических сигналов от датчиков температуры, а также от датчиков, формирующих унифицированный сигнал постоянного тока.

Рисунок 2.3.1 Внешний вид прибора ИП-6-ТК
Прибор имеет 2 реле, способных коммутировать цепь постоянного тока от 30В/5А до 125В/0,3А при активной или индуктивной (t£ 40 мс) нагрузке, а также переменного тока до 270В/3А при cosj ³ 0,4. Допускается коммутация цепи постоянного тока до 220В/0,15А при снижении ресурса реле до 10000 срабатываний.
Сопротивление нагрузки токового выхода, Ом, не более:
– при выходном сигнале 0–5 мА……………………………………. 2000
– при выходном сигнале 0–20 мА, 4–20 мА………………………… 600
– гальваническая развязка между входными цепями, токовым выходом, RS-485, выдерживающая действие испытательного напряжения, В……… 500
– потребляемая мощность, ВА, не более…………………………… 8
3. Анализ объекта управления
3.1 Определение типа объекта управления, его параметров и передаточной функции
Объектом управления (ОУ) называют агрегат или его участок, в котором протекает процесс управления.
Выходная величина объекта – это текущее значение регулируемого параметра. Любое воздействие на объект управления, приводящее к изменению регулируемой величины, называют входной величиной объекта управления. Входными величинами объекта управления являются возмущение по нагрузке, приводящее к нежелательному изменению регулируемой величины, и управляющее воздействие, оказываемое регулятором при помощи регулирующего органа. Благодаря управляющему воздействию достигается целенаправленное управление регулируемой величиной.
Для расчетов АСУ необходимо определить параметры объекта управления. Для определения параметров объекта управления производят эксперимент по снятию кривой разгона ОУ. Результаты снятия кривой разгона при входном воздействии равном 11% ХРО (хода регулирующего органа).