Курсовая работа: Разработка системы управления двигателя постоянного тока
Окончательно получим:
![]()
По рис. 3 [2, стр. 9]: ![]()
Полюсное деление равно:
![]()
Число витков обмотки возбуждения [2, стр. 27]: ![]()
Номинальный магнитный поток:
![]()
Постоянная машины:
![]()
Коэффициент рассеяния [3, стр. 38]: ![]()
Индуктивность обмотки возбуждения:
![]()
Постоянная времени обмотки возбуждения:
![]()
Постоянная времени обмотки возбуждения:
![]()
Суммарный момент инерции механизма:
![]()
Так же объёкт управления содержит ![]() возбуждения и
возбуждения и ![]() напряжения якоря, частота коммутации которых:
напряжения якоря, частота коммутации которых: ![]()
Постоянная времени преобразователей равна:
![]()
Так как ![]() и
и ![]() представим преобразователи в виде пропорциональных звеньев, откуда с учетом диапазона стандартных управляющих сигналов (
представим преобразователи в виде пропорциональных звеньев, откуда с учетом диапазона стандартных управляющих сигналов (![]() ) имеем и максимальной скважности
) имеем и максимальной скважности ![]() (
(![]() ) получим:
) получим:
![]()
2. Разработка алгоритма управления и расчёт параметров устройств управления
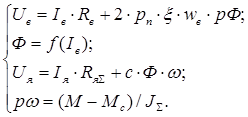
Объект управления описывается следующими уравнениями [3, стр.38-39]:
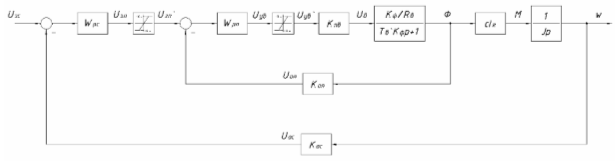
Выберем двухконтурную систему управления скорости с внутренним контуром потока (рис. 1).