Курсовая работа: Разработка устройства, предназначенного для формирования импульсных сигналов с заданным периодом и скважностью - ШИМ-регулятор
Пояснительная записка состоит из 30 страниц, на которых, помимо основного текста, размещены 8 таблиц, 12 рисунков. При написании использовано 9 источников, среди которых как книги, так и страницы Интернет.
УПРАВЛЕНИЕ, СХЕМОТЕХНИКА, МИКРОЭЛЕКТРОНИКА, АЛГОРИТМИЗАЦИЯ, ПРОГРАММИРОВАНИЕ.
В курсовом проекте разработано устройство, предназначенное для формирования импульсных сигналов с заданным периодом и скважностью - ШИМ-регулятор.
Разработана принципиальная электрическая схема устройства, написана программа управления ШИМ-регулятором через LPTпорт ЭВМ, произведена сборка и макетирование.
В проекте подробно описаны выбранные элементы схемы и рассказано о принципах работы ШИМ – регулятора.
Содержание
Введение
1 Описание ШИМ-регулятора
1.1 Классификация видов ШИМ
1.2 Применение широтно-импульсной модуляции
2 Выбор элементной базы
2.1 Микросхема КР580ВИ53
2.2 Микросхема К155АП5
2.3 Микросхема К155АГ3
3 Схема макета
3.1 Схема принципиальная электрическая
3.2 Таблица контактов
4 Программа управления
4.1 Логика работы
Заключение
Приложение А
Введение
До внедрения цифового широтно-импульсного модулирования (ШИМ) использовался аналоговый ШИМ. При аналоговой реализации ШИМ, сигналы получаются путем сравнения треугольного несущего сигнала и сигнала, подлежащего модуляции. Для трехфазных систем необходимы три независимых канала ШИМ: по одному на каждую фазу. Входами такого ШИМ устройства являются заданные фазные напряжения. В разомкнутых частотно-управляемых ЭП эти напряжения формируются на основе принятого закона частотного управления, в замкнутых ЭП - формируются с помощью контроллера.
При цифровой реализации широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза, значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП: значения отсчетов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
При работе с приводом может потребоваться управлять его скоростью. В простейшем случае это можно делать вставив транзистор (управляемое сопротивление) между источником фиксированного напряжения и приводом. Однако такой способ при управлении мощными приводами приводит к выделению большой тепловой мощности на транзисторе-сопротивлении.
ШИМ использует транзисторы(могут быть и др. элементы) не в активном, а в ключевом режиме, т. е. транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет бесконечное сопротивление, поэтому ток в цепи не течёт, и, хотя всё напряжение питания падает на транзисторе, т.е. КПД=0%, в абсолютном выражении выделяемая на транзисторе мощность равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность так же мала.
В данном случае была поставлена задача разработать ШИМ - регулятор на основе программируемого таймера серии КР580, чтобы регулировать ширину импульса. Такое устройство обеспечивает сохранность транзистора и экономичность.
1 Описание ШИМ-регулятора
1.1 Классификация видов ШИМ
В общем случае все виды ШИМ основаны на изменении длительности импульсов равной амплитуды, следующих через равные интервалы времени в соответствии с принятым законом формирования напряжения. Законы формирования, общие для любого метода модуляции, определяются функцией построения (модулирующим сигналом). На основании литературных данных целесообразно распределить разновидности ШИМ по степеням соответствия параметров импульсов значениям модулирующего сигнала согласно основным признакам (рисунок1).
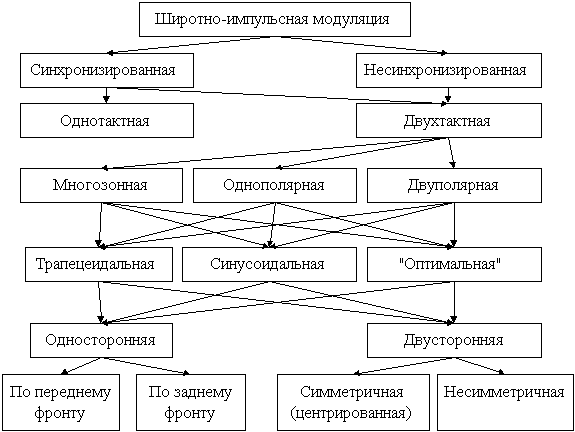
Рисунок. 1. Классификация видов ШИМ
Следует отметить, что в связи с развитием методов формирования синусоидальных напряжений, трапецеидальная ШИМ уже почти вытеснена синусоидальной. Двуполярная ШИМ характеризуется постоянным действующим значением выходного напряжения, поэтому регулирование значения основной гармоники сопровождается перераспределением энергии в спектре. Однополярная ШИМ дает лучший гармонический состав, действующие значения напряжения при этом меньше, чем в двуполярном варианте.
Современные ЭП строятся с использованием микроконтроллеров (МК), с помощью которых реализуется и ШИМ. В связи с этим вводится новый термин - тактовая частота ШИМ Fт, которая определяется точностью аппроксимации несущего Fн и модулирующего Fм сигналов. Как правило, соотношения между ними выбираются следующими:
Fн і n3Fм (n=2, 3, 4,...) и Fт і m2Fн (m=3,4,5,...)
Независимо от того, какая разновидность ШИМ используется, ее реализация на МК принципиально возможна двумя способами: традиционный (формирование выходных напряжений осуществляется в результате постоянного сравнения модулирующего и несущего сигналов) и табличный (полностью рассчитывается заранее и заносится в ПЗУ, из которого затем считывается).
--> ЧИТАТЬ ПОЛНОСТЬЮ <--