Курсовая работа: Регулирование давления в рабочем пространстве дуговой сталеплавильной печи ДСП-25Н5
Рисунок 3 - Структурная схема типовой САР.
На рисунке 3 регулирующее устройство РУ с исполнительным механизмом ИМ, задающим ЗУ и суммирующими устройствами образуют автоматический регулятор 1. Регулирующий орган РО, собственно объект регулирования ОР и измерительное устройство ИУ образуют обобщенный объект регулирования 2. Таким образом, автоматическая система регулирования состоит из регулятора (Р) и объекта (О), взаимодействующих между собой по замкнутому контуру (рисунок 4).
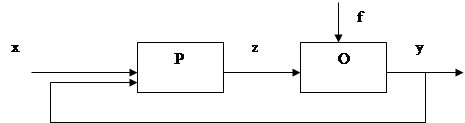
Рисунок 4 - Упрощённая структурная схема типовой САР.
Объект управления, как уже отмечалось выше, у нас представлен совокупностью двух типовых звеньев: апериодического и звена запаздывания.
Инерционное или апериодическое звено 1 – го порядка (применяется при теплообмене, при подаче газа в емкость). Звено характеризуется передаточным коэффициентом k и постоянной времени Т, определяемой, например, по касательной в точке t0 (максимальной скорости изменения выходной величины);
Запаздывающее звено, в котором входная величина копируется на выход, но с некоторой задержкой по времени Y ( t + T ) = X ( t ) (например, ленточный транспортер или эскалатор метро). Звено характеризуется временем задержки τ.
4 Составление функциональной схемы
По ходу плавки в электродуговую печь требуется подавать различное количество энергии. Менять подачу мощности можно изменением напряжения или силы тока дуги. Регулирование напряжения производится переключением обмоток трансформатора. Регулирование силы тока осуществляется изменением расстояния между электродом и шихтой путем подъема или опускания электродов. При этом напряжение дуги не изменяется. Опускание или подъем электродов производятся автоматически при помощи автоматических регуляторов, установленных на каждой фазе печи. В современных печах заданная программа электрического режима может быть установлена на весь период плавки.
В состав автоматизированной плавильной установки входят следующие агрегаты: I – дуговая плавильная печь, II – печной трансформатор, III – переключатель ступеней напряжения, IV – выключатель электропитания. Эта установка оборудована также комплексом контрольно – измерительных приборов.
Для измерения напряжения фазы после печного трансформатора на схеме имеется точка отбора ( ЕЕ) с позиционным обозначением 1а.В этой точке снимаются показания (рабочее напряжение) и сигнал передаёт на нормирующий преобразователь Е825/1 ( ЕУ) с позиционным обозначением на схеме – 1б.Затем в этой системе регулирования параметров электрического режима Е(ток, напряжение, мощность, количество израсходованной энергии) расположен на щите управления вторичный прибор ( EIR – показывающий и регистрирующий значение напряжения фазы) – 1в.На этом приборе отображается численное значение рабочего напряжения (≈280В). До печного трансформатора (II) осуществляют снятие показаний по измерению тока фазы – трансформатор тока ( ЕЕ) – 1г. Для преобразования полученного значения в унифицированный сигнал используется нормирующий преобразователь Е824 ( ЕУ) – 1д. Сигнал поступает на щит управления: на прибор с позиционным обозначением 1е ( EIR – прибор показывающий и регистрирующий). Задатчик Z с позиционным номером 1з вырабатывает задание для регулятора и подаёт его непосредственно на регулятор (EC) напряжения – 1ж.С регулятора сигнал поступает на исполнительный механизм – 1и – привод электрода, который перемещает электрод в нужную сторону на определённую длину, тем самым в печи поддерживается необходимый электрический режим. Расход электроэнергии на 1 тонну выплавленной стали и производительность печи зависят не только от технологических факторов (марки выплавленной стали, качества шихты и электродов, умения персонала, длительности простоев), но и от того, насколько правильно выбран электрический режим печи. Регулировать электрический режим можно, изменяя либо питающее напряжение(что было описано выше), либо длину, а, следовательно, и токи дуг.Первым способом пользуются обычно при переходе от одного этапа плавки к другому. Второй способ позволяет регулировать режим печи непрерывно и плавно, опуская и поднимая электроды при помощи системы автоматического регулирования, поддерживающей токи фаз печи на заданном уровне.
Так как регулирование режима ДСП осуществляется в основном путём изменения длины дуги, а с нею и тока, целесообразно в системе автоматического регулирования выявить зависимость от тока её основных параметров: полной (активной) мощности и количества израсходованной электроэнергии. Поэтому в рассматриваемой САР имеется нормирующий преобразователь Е829 (EY) – 1к для определения активной мощности фазы (P=IU) и показывающий и регистрирующий прибор на щите управления ( EIR) также для отображениячисленного значения потребляемой мощности – 1л. Прибор с позиционным номером 1мявляется счётчиком электроэнергии ( EQRS) и, одновременно, вычислительным устройством (Q=IUt). С него сигнал поступает на специальный дозатор электроэнергии (ES) – 1н,который имеет своё задание Z – 1п (по энергии)и 1о (по времени). KS – прибор для управления процессом во временной программе, установленный по месту для определения времени, прошедшего с начала плавки (необходимого для последующего расчёта электроэнергии). Примером может быть командный электропневматический прибор, многоцепное реле времени, и т.п. Прибор с номером 1с на щите управления (TIR) является показывающим и регистрирующим температуру футеровки ( Тф) , на который поступает сигнал с датчика температуры (ТЕ) – 1р, установленного по месту (например, термопара). Приборы 1ри 1с образуют отдельную систему контроля температуры металла. Со специального дозатора электроэнергии с позиционным обозначением 1н сигнал поступает на исполнительный механизм 1т, с помощью которого происходит включение привода переключателя печного трансформатора и переключение ступеней напряжения, то есть изменение электрического режима плавки. Регулятор 1ж обрабатывает новую информацию (произошло изменение величины напряжения) и, в зависимости от величины рассогласования между показанием прибора 1а и величиной задания 1з, вырабатывает сигнал на исполнительный механизм, приводящий в действие привод электрода, кото?