Курсовая работа: Розробка операційного та керуючого автомату що виконує операцію прискореного множення
+ 0.0000000010100000
![]() 1.0111001001000011
1.0111001001000011
1.1000110110111101
СМ:=СМ+1;
В результаті отримали відповідь:
А*В=1.10001101101111012 = – 0,553665161133;
2. Синтез керуючого автомату
2.1 Теоретичні відомості
Як такого конкретного визначення автомату не має, цей термін використовується в двох аспектах: автомат – як пристрій, виконуючий деякі функції, без участі людини; з другого боку, автомат як математичне поняття – математична модель реальних технічних автоматів.
Автомат називається скінченим, якщо множина його внутрішнього стану та множина значень вхідних сигналів – скінчена множина. В практиці часто використовується поняття цифрового автомату, під яким сприймають пристрій, призначений для перетворення цифрової інформації.
Автомат задається трьома алфавітами і двома функціями (функція переходів та функція виходів), одним початковим станом. Поняття стану автомату використовується для описання систем, виходи яких залежать не тільки від вхідних сигналів в даний момент часу, але і від деяких сигналів, які поступили на входи системи раніше. Функція переходів – це залежність нового стану від попереднього та вхідних сигналів. Функція виходів – залежність вихідного сигналу від вхідного та попереднього стану.
Закон функціонування управляючого автомату можна описати у вигляді списку переходів автомата. Так, закон функціонування автомата можна представити у вигляді таблиці з такими розділами: номер переходу, вихідний стан, його код, наступний стан, його код, вхідний набір, вихідний набір, сигнали збудження. Цей список переходів дозволяє компактно і наочно зобразити закон функціонування автоматів. Перемикання автомата з одного стана в інший виконується шляхом зміни стану запам’ятовуючих елементів, які переключають сигнали збудження.
Керуючі автомати з жорсткою логікою будуються на базі логічних й запам’ятовуючих елементів, які об’єднуються в логічну схему, яка функціонує в відповідності з заданим законом.
Розрізняється два типи автоматів: Мура і Мілі. Мура простіший в розумінні, Мілі – складніший, при реалізації – навпаки. У Мура Вихідні сигнали пов’язані тільки зі станами, для Мілі вихідні сигнали залежать як від станів, так і від вхідних сигналів.
Коли графік програми позначають станами, то для Мура станами позначають операційні вершини, для Мілі – зв’язки між операційними вершинами так, щоб витратити якомога менше станів, причому, щоб кожна операційна вершина знаходилась між двома станами, і між двома операційними вершинами був стан.
2.2 Розробка алгоритму роботи автомату
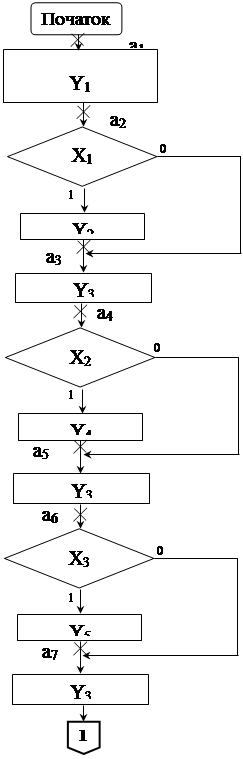
Перейдемо від блок-схеми алгоритму до блок-схеми автомата позначивши станами зв’язки між операційними вершинами так, щоб витратити якомога менше станів, причому, щоб кожна операційна вершина знаходилась між двома станами, і між двома операційними вершинами був стан.
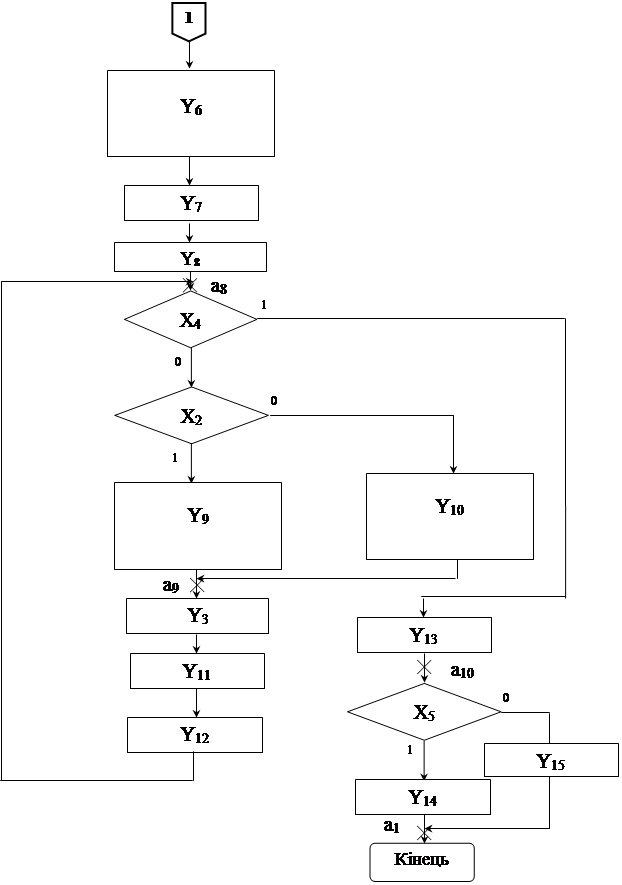 |
Позначаємо через X умовні вершини, якщо зустрічаються однакові умовні вершини, то і їх позначаємо однаково. Отримали всього 5 різних умовних вершин.
Через Y позначимо операції, якщо зустрічаються однакові операції, то вони теж позначаються однаково. Якщо між операціями немає умовної вершини то їх об’єднуємо в одну операційну вершину і між ними не ставиться стан. Кількість розставлених станів дорівнює 10, для їх кодування використаємо 4 двійкових розрядів.
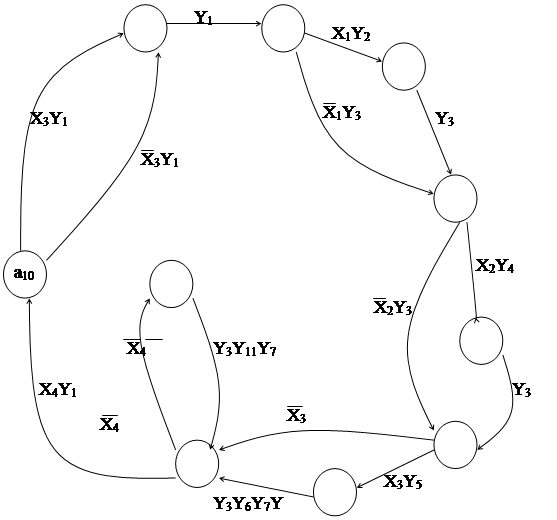
2.3 Побудова графа автомата
Наступним кроком у синтезі керуючого автомату є перехід до графу автомата. Якщо станам поставити в відповідність вершини графа, а шляхам переходу від одного стану до іншого через умовні та операційні вершини – дуги (з цієї вершини в наступну), які відмічені набором значень вхідних та вихідних сигналів, то отримаємо граф який буде визначати закон функціонування автомата Мілі. Відмітимо, що дуги на графі автомата відмічаються тільки тими вхідними сигналами, які визначають можливість переходу між станами, і тими вихідними сигналами, які в даній ситуації приймають відповідне значення.
2.4 Побудова таблиці функціонування
Таблиця функціонування – це таблиця переходів. В ній кожна стрічка це перехід між станами автомата, де вказується попередній стан, його код, наступний стан і його код, вхідні сигнали, які викликають цей перехід, вихідні сигнали, які пов’язані з цим переходом, сигнали збудження входів запам’ятовуючих елементів (тригерів).
Автомат вказаний на графі має 10 станів, для їх кодування використовуємо 4 двійкових розряди, тому потрібно 4 тригера. Закодуємо стани автомата таким чином: а1 = 0001, а2 = 0010, а3 = 0011, а4 =0100, а5 = 0101, а6 = 0110, а7 = 0111, а8 = 1000, а9 = 1001, а10 = 1001.
|
Попередній стан |
Код К-во Просмотров: 271
Бесплатно скачать Курсовая работа: Розробка операційного та керуючого автомату що виконує операцію прискореного множення
|