Курсовая работа: Синтез системы автоматического регулирования радиального перемещения каретки
Диск
O
З D
Л
Рис.1. Базовая оптика.
Излучение полупроводникового лазера Л фокусируется через прозрачную подложку диска на поверхность, несущую информацию, с помощью объектива микроскопного типа О . Часть отраженного света, собираемого тем же объективом, направляется полупрозрачным зеркалом З на детектор (фотоприемник) D .
Для сканирования всего диска эта конструкция должна быть укреплена на каретке, перемещающейся по радиусу диска. При этом малые и кратковременные ошибки (отклонения) пятна от дорожки устраняются за счет перемещения компактной головки относительно каретки.
Для слежения за дорожкой пятном света необходимы по крайней мере две системы управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном направлении (вдоль дорожки), предназначенная для компенсации высококачественных изменений скорости считывания.
Таким образом, в настоящее время оптические дисковые системы снабжены пятью системами автоматизированного регулирования, а именно:
– Вращения диска (САРВ);
– Тангенциального слежения (САРТ);
– Радиального слежения за дорожкой (САРД);
– Радиального перемещения каретки (САРРП);
– Вертикального слежения за фокусировкой (САРФ).
Передаточные функции звеньев
слежение перемещение каретка
Системы радиального слежения за дорожкой обычно имеют малый диапазон смещения пятна. Для считывающей головки это, как правило, электромеханические ограничения, обусловленные свойствами подвески и привода. Они обуславливают диапазон радиального смещения в несколько миллиметров. Поэтому для считывания всего поля записи применяется подвижная каретка, на которой располагается оптический блок с САРД и САРФ. Если требуется быстрый доступ к далеко расположенным (относительного текущего положения) кадрам записи, требуется быстрое перемещение каретки, так называемый перескок.
Каретка должна двигаться по направляющим таким образом, чтобы она могла свободно перемещаться только в одном направлении, причём, как правило, САРФ находится в активном состоянии. Поэтому небольшие перемещения в вертикальном положении, вызванные радиальным движением каретки, не должны нарушать работу САРФ. В частности, например, отклонение перемещения каретки от плоскости диска не должно быть больше +0,5°. Эти не особенно жесткие требования могут удовлетворяться несколькими системами направляющих устройств. Часто используются устройства, в которых каретка движется по двум параллельным стержням (направляющим) с подшипниками скольжения.
Привод каретки, исключая линейные приводы, состоит из обычного электродвигателя с редуктором и преобразователем вращательного движения в поступательное. Для получения более низкого уровня шума в редукторе используются, как правило, пластмассовые шестерни, а иногда применяется и ременная передача. Для преобразования вращательного движения в поступательное наиболее часто используются червячная передача, зубчатая рейка, зубчатый ремень, простой ремень (стальной или из синтетических материалов) и фрикционная передача.
Для качественной работы САРРП очень важно, чтобы между углом поворота мотора и смещением каретки не было мертвого хода. Наличие мертвого хода может привести к возникновению нежелательных в САРРП автоколебаний. Поэтому применяются передачи с люфто-выбирателями.
Если применяется линейный двигатель, то проблемы мертвого хода не возникает, поскольку управляющая сила действует непосредственно на каретку. Недостатком ЛЭД является его малая эффективность из-за большого диапазона смещения.
На рис. 2 показана кинематическая схема механизма перемещения каретки с использованием электродвигателей. Проблемы мертвого хода и преобразования вращательного движения в поступательное решаются с помощью натянутого зубчатого ремня, изготовленного из синтетического материала и имеющего сердцевину из стальной ленты. Это позволяет увеличить резонансную частоту передачи усилия от двигателя к каретке до 500 Гц и более. Направляющие выполнены с применением шарикоподшипников, обеспечивающих точное задание поступательного движения.
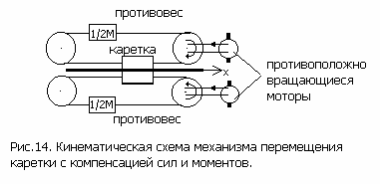
Высокое значение резонансной частоты обеспечивается малой массой каретки, которая наряду с большой мощностью моторов позволяет получать очень высокие ускорения каретки. При этом появляется сила реакции, действующая на несущую конструкцию всего устройства, а это может привести к возникновению в ней нежелательных смещений и вибраций, ухудшающих работу всех САР. Для предотвращения этого и используются противовесы и два двигателя. Такая система привода позволяет скомпенсировать силы и моменты реакции. При близких характеристиках двигатели можно с приемлемой точностью рассматривать как один, с удвоенным моментом на валу.
Обычно используются электродвигатели постоянного тока с независимым возбуждением. Система уравнений для такого двигателя при управлении по цепи якоря имеет вид:
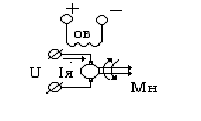
Рис.15. Двигатель постоянного тока
L я ![]() + r я × i я - C е × W = U (9)
+ r я × i я - C е × W = U (9)
См × i я – I ![]() = M н (10)
= M н (10)
где L я и r я - индуктивность и сопротивление нагрузки якорной цепи;