Курсовая работа: Синтез системы автоматического регулирования радиального перемещения каретки
![]() .
.
Для того, чтобы обеспечить заданное качество запас устойчивости по фазе на частоте среза c ![]() должен составлять 30¸60°, а запас устойчивости по амплитуде, определяемый на частоте где j(w)=-180°, должен составлять 6¸10 дб. Это достигается, если постоянные времени удовлетворяют условиям
должен составлять 30¸60°, а запас устойчивости по амплитуде, определяемый на частоте где j(w)=-180°, должен составлять 6¸10 дб. Это достигается, если постоянные времени удовлетворяют условиям

 .
.
Исходя из рисунка:
wо = 2 с-1 ;
По формулам выше:
t = 0.85 с;
T = 0.1 с;
После построения желаемой ЛАХ определяется ЛАХ корректирующего устройства по формуле
![]()
По виду этой кривой можно определить передаточную функцию КУ. Для этого следует построить ассимптотическую ЛАХ КУ, а затем определить ее наклон на частотах w®0, и точки перегиба. Наклон характеристики на частотах w®0 в –20×n дб/дек определяет сомножитель 1/sn в Wку (s). Перегиб ЛАХ на частоте w=1/T на –20×n дб/дек приводит к появлению членов 1/(Ts+1)n в передаточной функции КУ, а перегиб ЛАХ на частоте w=1/t на –20×n дб/дек к появлению членов (Ts+1)n . Коэффициент передачи КУ определяется по значению ординаты ассимптотической ЛАХ КУ на частоте w=1 с-1 (если n =0, то на частоте w=0).
В нашем случае:
Wку =![]() .
.
Моделирование САР
Для подтверждения расчетов и их коррекции в случае необходимости проведем моделирование САР с помощью пакета TAY_1.
1. Моделирование желаемой (нескорректированной) ЛАХ

Вычисленное значение w0 совпадает с реальным, поэтому расчеты Т и t можно принять верными на данном этапе проектирования.
2. Моделирование скорректированной ЛАХ

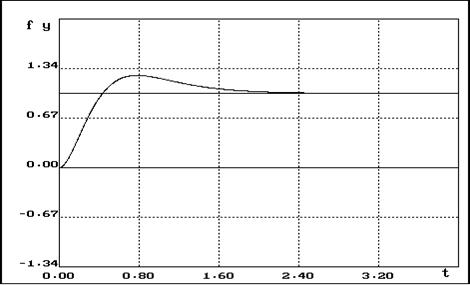
Посмотрим, как реагирует система на вхдное воздействие вида: f = 1 (единичное воздействие):
Проверим реагирование на синусоидальное входное воздействие f = 500 Sin (0.3t):
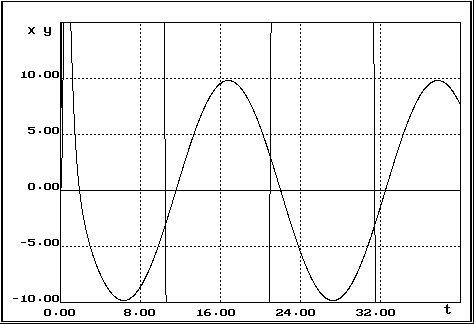
Из рисунка видно,что система выполняет условие по точности, то есть ошибка не превышает величины 10 мкм.
Вывод: спроектированная САР удовлетволяет всем требованиям, поставленным в задании. Таким обрахом, синтез САР можно считать законченным.
Библиографический список
1. Сапаров В.Е., Максимов Н.А. Системы стандартов в электросвязи и радиоэлектронике. М.: Радио и связь, 1985. 248 с.
2. Микропроцессорные системы автоматического управления./Под ред. Бесекерского В.А. Л., Машиностроение, 1988.