Курсовая работа: Синтез системы автоматического регулирования радиального положения пятна
Рис 2.4. Схема датчика положения.
Уравнения имеют вид:
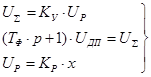
где kp – крутизна характеристики сигнала ошибки радиального слежения, которая определяется линеаризацией характеристики сигнала расфокусировки.
Схема датчика положения приведена на рис 2.5.

Рис. 2.5. Схема датчика положения.
Тогда передаточная функция будет выглядеть так:
![]()
где Ку – коэффициент передачи суммирующего усилителя; ![]()
Тф – постоянная времени фильтра низких частот и находится по формле:
![]()
где λ – максимальное расстояние между двумя переходами от пита к ленду в канальном ходе на дорожке диска.
f – скорость считывания канального хода потока данных.
f=14·F, f=2100 Кбайт/с=1,68·107 бит/с;
Тф =3,05·10-7 с;
Кр – находится путем линеаризации (см. Приложение 1)
![]() ,
,
тогда передаточная функция ![]()
Расчет линейного электродвигателя
Далее сигнал выхода усилителя мощности поступает на исполнительный двигатель, как правило линейный электродвигатель (ЛЭД), работающий по принципу громкоговорителя. Составными частями такого двигателя являются: катушка, постоянный магнит и, возможно, магнитопровод из магнитномягкого железа.
Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
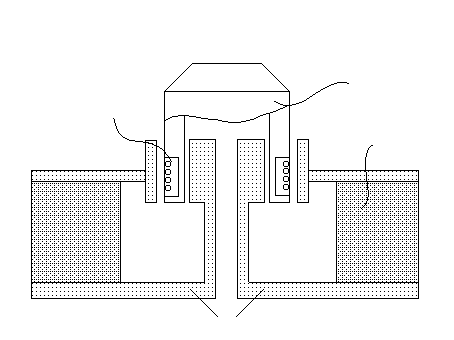 Конструкция с подвижной катушкой (рис.3.1) имеет ряд преимуществ и недостатков. Помимо проблем обрыва проводников, подводящих ток к катушке, движущая часть имеет обычно плохой тепловой контакт с окружающей средой (высокое тепловое сопротивление RT ). Тепло, выделяющееся в подвижной катушке, приводит к росту температуры всей подвижной части, в частности объектива, что нежелательно. Это в конечном счете приводит к уменьшению среднего значения силы, развиваемой данным ЛЭД.
Конструкция с подвижной катушкой (рис.3.1) имеет ряд преимуществ и недостатков. Помимо проблем обрыва проводников, подводящих ток к катушке, движущая часть имеет обычно плохой тепловой контакт с окружающей средой (высокое тепловое сопротивление RT ). Тепло, выделяющееся в подвижной катушке, приводит к росту температуры всей подвижной части, в частности объектива, что нежелательно. Это в конечном счете приводит к уменьшению среднего значения силы, развиваемой данным ЛЭД.
считывающая
головка
катушка
магнит
магнитопровод
Рис.3.1. Привод головки с подвижной катушкой.
Достоинством системы с подвижной катушкой является то, что стационарная магнитная система может быть увеличена и, следовательно, с ее помощью можно обеспечить более сильное магнитное поле (высокое значение магнитной индукции В).