Курсовая работа: Система автоматического регулирования
Рассмотрим возможность ПИ-закона регулирования САР температуры. Для этого построим структурную схему, в которую включим ПИ-регулятор.
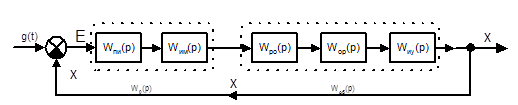
Рис 10. Структурная схема САР температуры.
Передаточная функция ПИ-регулятора имеет вид
WP (р)=К+1/Тр ; (К=20; Ти =25 сек.)
Найдем передаточную функцию разомкнутой системы
Wраз (р)=Wр (р)Wоб (р)

Найдем передаточную функцию замкнутой системы
![]()
По передаточной функции разомкнутой системы строим ЛАЧХ и ЛФЧХ, а по функции замкнутой системы строим АФХ.
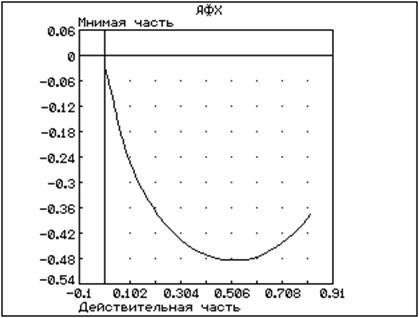
Рис 11. Амплитудно-фазовая характеристика замкнутой системы.
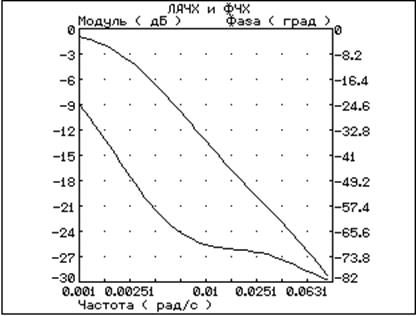
Рис 12. ЛАЧХ и ЛФЧХ при астатическом регулировании.
Частотные характеристики показывают, что система имеет запас устойчивости, как по амплитуде, так и по фазе, т.к. на частоте среза wср фаза < 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Исследование качества одноконтурной САР.
К автоматическим системам регулирования предъявляются требования не только в отношении ее устойчивости. Для работоспособности системы не менее необходимо, что бы процесс автоматического регулирования при определенных качественных показателей.
Требования к качеству процесса регулирования в каждом случае могут быть самыми разнообразными, однако из всех качественных показателей можно выделить несколько наиболее существенных, которые с достаточной полнотой определяют качество почти всех АСР.
Качество процесса регулирования системы, как правило, оценивают по ее переходной функции.
Основными показателями качества является: - время регулирования tр – называется время, в течении которого, начиная с момента приложения воздействия на систему отклонения регулируемой величины Dh(t) от ее установившегося значения h0 =h(¥) будут меньше на пред заданной величины Е. Обычно принимают, что по истечении времени регулирования отклонении регулируемой величины от установившегося значения должно быть не более Е=5%. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
- перерегулированием s называется максимальное отклонение Dhmax регулируемой величины от установившегося значения, выраженное в процентах от h0 =h(¥).
Абсолютная величина Dhmax определяется из кривой переходного процесса:
Dhmax =hmax - h(¥)
Соответственно перерегулирование будет равно:
- Колебательность системы характеризуется числом колебаний регулируемой величины за время регулирования tр . Если за это время переходный процесс в системе совершает число колебаний меньше заданного, то считается, что система имеет требуемые качеством регулирования в части ее колебательности;
- Установившаяся ошибка Е. Установившееся значение регулируемой величины h0 в окончании переходного процесса зависит от астатизма n системы. В статических системах (n=0) – установившаяся ошибка при постоянной величине входного воздействия не равна 0 и следовательно, установившееся значение регулируемой величины h0 будет отличаться от ее заданного значения на величину установившейся ошибки.