Курсовая работа: Система управления тиристорного электропривода продольно-строгального станка
Содержание
Введение
1. Описательно технологическая часть
1.1. Назначение и техническая характеристика оборудования
1.2. Краткий технологический процесс работы оборудования
1.3. Требования, предъявляемые к системе управления ЭП
2. Расчетно-техническая часть
2.1. Расчёт мощности и выбор двигателя привода
2.2. Выбор тиристорного преобразователя и расчёт
его силовых параметров
2.3. Расчёт регулировочных и внешних характеристик
тиристорного преобразователя
2.4. Выбор функциональных блоков и устройств системы управления
2.5. Выбор электрических аппаратов управления и защиты
2.6. Краткий принцип работы системы
3. Экономическая часть
3.1. Комплексное технико-экономическое сравнение
основных показателей ЭП
4. Охрана труда
4.1. Техника безопасности при эксплуатации
автоматизированных ЭП
5. Специальная часть
5.1. Возможные неисправности, причины возникновения
и способы их устранения
6. Заключение по проекту
Список используемой литературы
Графическая часть
Лист 1 – Силовая и функциональная схемы тиристорного ЭП. Графики характеристик.
Введение
B современном промышленном и сельскохозяйственном производстве, на транспорте, в строительстве и коммунальном хозяйстве, в быту применяются самые разнообразные технологическиё процессы, для реализации которых человеком созданы тысячи различных машин и механизмов. C помощью этих рабочих машин и механизмов осуществляется добыча полезных ископаемых, обрабатываются различные материалы и изделия, перемещаются люди, предметы труда, жидкости, газ и реализуются многие другие процессы, необходимые для жизнеобеспечения человека. Так, добыча полезных ископаемых ведется c помощью экскаваторов, буровых установок и угольных комбайнов, детали и материалы обрабатываются на разнообразных станках, люди и изделия перемещаются транспортными средствами, лифтами и эскалаторами, жидкости и газы транспортируются c помощью насосов и вентиляторов.
Рабочая машина или производственный механизм состоят из множества взаимосвязанных деталей и узлов, один из которых непосредственно выполняет заданный технологический процесс или операцию и поэтому называется исполнительным органом. Отметим при этом одно очень важное обстоятельство - все названные технологические процессы осуществляются за счет механического движения исполнительных органов рабочих машин и механизмов. Исполнительный орган в процессе выполнения заданной операции должен преодолевать сопротивление своему движению, обусловленное наличием трения или притяжения Земли, упругой и пластической деформациями веществ или другими факторами. Для этого к нему необходимо подвести механическую энергию от устройства, которое в соответствии со своим назначением получило на звание привода.
Механическая энергия вырабатывается приводом, который преобразовывает другие виды энергии. B зависимости от вида используемой первичной энергии различают гидравлический, пневматический, тепловой и электрический приводы. B современном промышленном производстве, коммунальном хозяйстве и в быту наибольшее применение нашел электрический привод, на долюкоторого приходится более 60% потребляемой в стране электроэнергии.
Такое широкое применение ЭП объясняется целым рядом его преимуществ по сравнению c другими видами приводов: использование электрической энергии, распределение и преобразование которой в другие виды энергии, в том числе и в механическую, наиболее экономично; большой диапазон мощности и скорости движения; разнообразие конструктивного исполнения, что позволяет рационaльно соединят привод c исполнительным органом рабочей машины и использовать для работы в сложных условиях - в воде, среде агрессивных жидкостей и газов, космическом пространстве; простота автоматизации технологических процессов; высокий КПДи экологическая чистота. Возможности использования современных электроприводах продолжают постоянно расширяться за счет достижений в смежных областях науки и техники - электромашиностроении и электроапаратостроении,электронике и вычислительной технике, автоматике и механике.
1. Описательно-технологическая часть
1.1. Назначение и техническая характеристика оборудования
Продольно-строгальные станки предназначаются в основном для обработки резцами плоских горизонтальных и вертикальных поверхностей у крупных деталей большой длины.
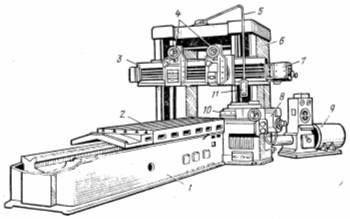
Рисунок 1 – Общий вид тяжелого продольно-строгального станка
На этих станках можно также производить прорезание прямолинейных канавок различного профиля, Т-образных пазов и т.д. Детали средних размеров устанавливаются рядами на столе станка и обрабатываются одновременно.
Продольно строгальные станки разделяются на одностоечные (с консольной поперечиной) и двухстоечные (портального типа). На рисунке 1 показан общий вид двухстроечного продольно-строгального станка. Его станина 1 имеет продольные направляющие (плоские и V-образные) . По ним возвратно-поступательно движется стол 2, на котором закрепляют обрабатываeмую деталь. Перемещение стола-главное движение -осуществляется от электродвигaтеля 9,через редуктор и реечную передачу. Снятие стpужки c обрабатываемой детали (строгание) происходит при ходе стола вперед (прямой или рабочий ход). Ход стола назад (обратный ход) совершается обычно c повышенной скоростью, и снятие стружки не производится (холостой ход), a резцы в это время автоматически отводятся от обработанной поверхности (поднимаются). Изменение направления движения стола производится при помощи электромагнитной реверсивной муфты (на малых станках), или посредством реверсирования главного двигатeля. Портал станка 6 образован двумя вертикальнимистойками и верхней балкой. К этой балке прикреплена подвеска 5 пульта упрaвления 11. По вертикальным направляющим стoек при помощи ходовых винтов перемещаются поперечина (траверса) 3 и боковой суппорт10 (некоторые станки имеют два боковых суппорта).
Поперечина имеет горизонтальные направляющие, по котоpым могут перемещаться вертикальные суппорты 4.Суппорты станка c закрепленными в них резцами oсуществляют прерывистую периодическую подачу за время реверса стола c обратного хода на прямой и быстрые устанoвочные перемещения. Движение суппортам передается через коробки подач 7 и 8 отдельных электродвигателей.
Основными величинами, характеризующими размеры и технологические возможиости различных продольнострогальных станков, являются наибольшая длина строгания (ход столa) L (от 1,5 до 12 м), наибольшая ширина обработки (от 0,7 до 4 м) и наибольшее тяговое усиление на рейке стола Fт (до 30-70 кН и более).
1.2. Краткий технологический процесс работы оборудования
При строгании рисунок 2 снятие стружки происходит в течении рабочего хода, при обратном ходе резец не работает. Продольное перемещение стола при рабочем ходе является главным движением.
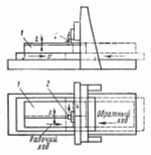
Рисунок 2 – Схема строгания
Движение подачи называется перемещением резца в течении одно и двойного хода перпендикулярно главному движению. Вспомогательными движениями на строгальных станках являются быстрое перемещение траверсы и суппортов подъём резцов при обратном ходе, а также, например, медленное перемещение стола при наладочных операциях. Скорость, с которой резец перемешается относительно детали при рабочем ходе, называется скоростью резания.
Глубина резания – величина, на которую углубляется резец в изделие при одном проходе, она определяет толщину снимаемой стружки.
1.3. Требования, предъявляемые к системе управления электроприводом
Исходя из тех условий технологического режима работы станка необходимо обеспечить следующие условия:
- Диапазон регулирования скорости определяется процессом обработки детали на станке связанным с технологией производства.
- Система электропривода должна обеспечивать плавность и точность регулирования скорости в заданном диапазоне.
- Механические характеристики электропривода в заданном диапазоне регулирования должны быть жёсткими.
- Система управления электропривода должна обладать качественными динамическими свойствами: быстродействие, устойчивость при регулировании, надёжность в работе.
Системы управления предназначены для автоматического формирования сигналов управления ,которые обеспечивают открывание силовых тиристоров преобразователя. Формируемые импульсы поступают в виде сигналов напряжения на управляющий электрод и катод тиристора.
Задачи системы управления:
--> ЧИТАТЬ ПОЛНОСТЬЮ <--