Курсовая работа: Теорії лінійних одноконтурних автоматичних систем регулювання
Межа стiйкості наведена на рис.3.
![]() Рисунок 3. Побудова межі стiйкості АСР.
Рисунок 3. Побудова межі стiйкості АСР.
5. Обчислення оптимальних параметрів регулятора
Визначенню підлягають налаштування, що найкраще забезпечують заданий ступінь коливальності для ПП або ступінь загасання ПП:
![]()
![]()
![]()
![]()
Виконавши формальну заміну s на ![]() одержимо
одержимо
![]()
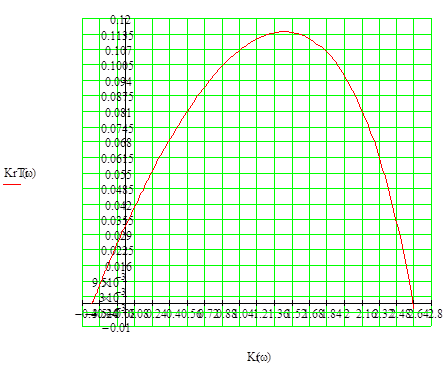
Для побудови розширеної КЧХ об’єкту: за дійсною та фіктивною частинами.



Рисунок 4. - РКЧХ об’єкту при m=0,37
З графіку ми бачимо, що оптимальними настройками для даної АСР буде Кр=1.6;
Кр/Тu=0.12;
Тu=13.3с.
6. Побудова КЧХ розімкнутої автоматичної системи регулювання.
Визначення запасу сталості за модулем і фазою
Як і раніше, дана КЧХ - Wpc (![]() ) вираховується і будується за дійсною і фіктивною складовими.
) вираховується і будується за дійсною і фіктивною складовими.
![]()
Або з урахуванням КЧХ ПІ-регулятора.
![]()
Звідси отримуємо:


Рисунок 5- Побудова КЧХ розімкненої системи АСР
З цього графіку знайдені параметри С та g - запаси сталості за модулем та фазою відповідно:
С=0.3; γ = o .

Рисунок 6 - Графік перехідного процесу регулювання в АСР (налаштування регулятора знайденi за методом РКЧХ).