Лабораторная работа: Идентификация и моделирование технологических объектов
Рисунок 5 – Схема модели компенсации люфта в среде Matlab
Полученные эпюры сигналов на входе (выходе) звена типа «люфт» и после компенсации изображены на рисунке 6.
|
|
|
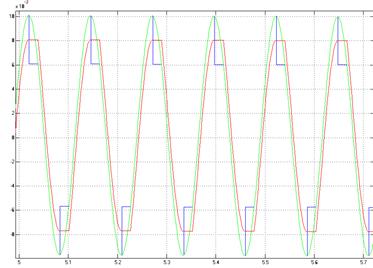
Рисунок 6 – Графики сигналов на входе звена типа «люфт» и после компенсации в среде Matlab
Выводы: в ходелабораторной работы я приобрел навыки моделирования нелинейного объекта типа «люфт», проанализировала их влияние на точность системы, составила и исследовала модель для компенсации люфта.
Оптимизация параметров пид-регуляторов для объектов управления с нелинейностями
Цель работы: освоение пакета прикладных программ NonlinearControlDesign (NCD) Blockset системы MATLAB для автоматической настройки параметров моделируемых систем электроприводов в условиях ограничений.
Индивидуальное задание:
Коэффициенты передаточной функции:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Неопределенный параметр ![]() в диапазоне 0,2…0,5.
в диапазоне 0,2…0,5.
Желаемые параметры качества переходного процесса δ=±5%; σ=1,2; tпп =1,5 с
Ход работы
Передаточная функция объекта (электропривода):
![]()
Коэффициент интегральной составляющей:
![]() .
.
Коэффициент дифференциальной составляющих:
![]() .
.
Пропорциональная составляющая (предельное значение):
![]() .
.
Строим исследуемую схему в среде MatLab.
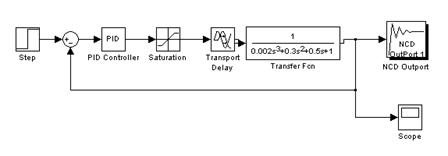
Рисунок 1 – Структурная схема модели для оптимизации ПИД-регулятора
Графики переходного процесса с оптимизированными параметрами ПИД-регулятора, представлены на рисунках 3-4.
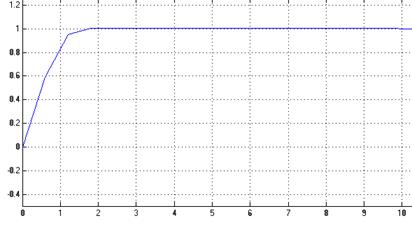
Рисунок 3 – График переходного процесса для заданной модели (Scope)
Параметры системы при оптимизации:
Starttime: 0 Stoptime: 60.
There are 2405 constraints to be met in each simulation.