Реферат: Анализ и синтез систем автоматического регулирования
5. сделать вывод.
2. Синтез системы регулирования
2.1. Выбор типа регулятора
Заданную длительность переходного процесса можно обеспечить при использовании регуляторов Смита и Ресвика. В регуляторе Ресвика используется обратная модель объекта содержащая дифференцирующее звено. Наличие дифференцирующего звена увеличивает шум сигнала и может привести к неустойчивости системы. В регуляторе Смита в контуре неявного обращения модели используется прямая модель объекта. Таким образом, синтезируем систему с регулятором Смита.
 |
??? ????????? ?????????? ????????? ?????????
Идеальная передаточная функция компенсатора контролируемого возмущения определяется из соотношения:
 ,
,![]()
Наличие в передаточной функции компенсатора контролируемого возмущения дифференцирующего звена может привести к колебательности управления, поэтому можно остановиться на статической модели:
![]() .
.
2.2. Алгоритм моделирования непрерывной САР на ЭВМ
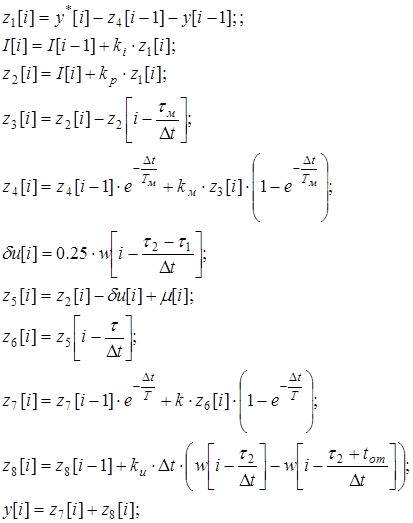
Для дальнейшего моделирования системы на ЭВМ необходимо привести все уравнения к дискретной форме.
Инерционное звено первого порядка в дискретной форме примет вид:
![]() ;
;
интегральное звено с отсечкой:
 ;
;
ПИ-регулятор:
![]() ;
;
![]() ;
;
Введем в систему промежуточные переменные z1 -z8 :
 |
????? ???????? ????????????? ??????? ????? ????????? ????????? ???????:
цикл по i от 0 до N;
конец цикла по i.
Из условия ![]() , получаем
, получаем ![]() и принимаем
и принимаем ![]() .
.
3. Выбор настроек системы регулирования
Для полученной в [2] системы регулирования, время переходного процесса будет определяться значениями коэффициентов ![]() и
и ![]() регулятора
регулятора ![]() . Так как заданная длительность переходного процесса достаточно мала, необходима очень точная настройка регулятора. Для настройки регулятора воспользуемся алгоритмом симплекс поиска.
. Так как заданная длительность переходного процесса достаточно мала, необходима очень точная настройка регулятора. Для настройки регулятора воспользуемся алгоритмом симплекс поиска.
Начальные условия для симплекс поиска:
![]() ;
; ![]() ;
; ![]() ;
;
Результатом симплекс поиска оказалась точка:
![]() ;
; ![]() ;
; ![]() ;
;
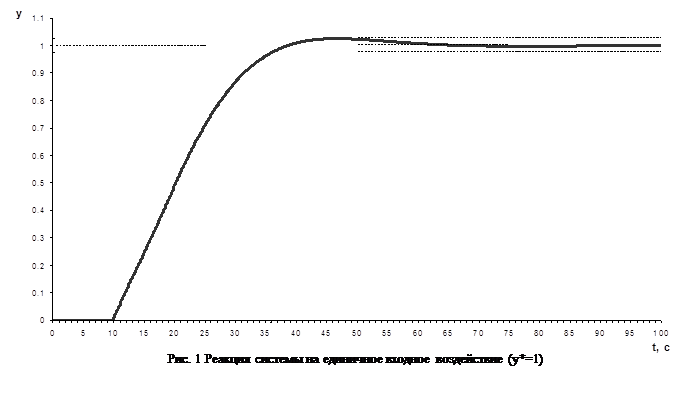
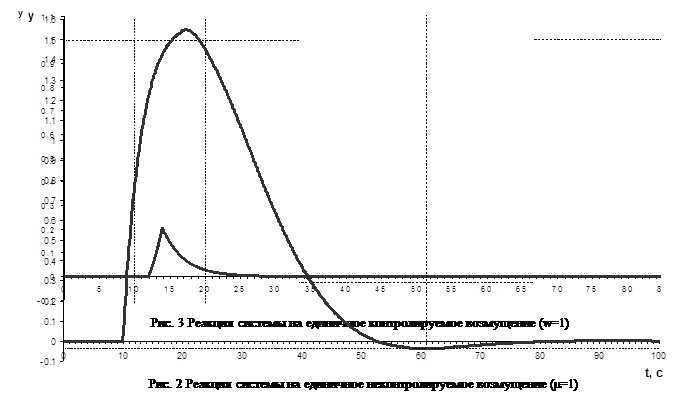
Реакция системы на единичное входное воздействие при данных настройках регулятора приведена на рис. 1. Реакция системы на единичное неконтролируемое возмущающее воздействие приведена на рис. 2. Реакция системы на единичное контролируемое возмущение приведена на рис. 3.
4. Исследование устойчивости системы
Для построения областей устойчивости воспользуемся условием, данным в пункте 5 рекомендаций к курсовой работе:
![]() ,
,