Реферат: АСУ двухстадийного дробления замкнутого цикла
Из приведенной структурной схемы можно получить выражения передаточных функций, связывающих
 Рис. 4.3. Структурная схема щековой дробилки
Рис. 4.3. Структурная схема щековой дробилки
производительность дробилки с полным запасом материала m:
В разобранной структурной схеме щековой дробилки не учитывается чистое запаздывание, физическая природа которого связана с временем свободного падения горной массы с питателя в камеру дробления τ1 и временем свободного падения дробленого материала на конвейер, транспортирующий продукт, τ2. Однако это запаздывание необходимо учитывать. Пренебрегая изменением уровня материала на конвейере и запасом материала в камере дробления, можно принять τ1 и τ2 постоянными. С учетом выражений (4.3) и (4.4) можно записать:
 (4.3)
(4.3)
 (4.4)
(4.4)
 Тогда передаточная функция
Тогда передаточная функция ![]() по соответствующим каналам с учетом звеньев чистого запаздывания запишется так:
по соответствующим каналам с учетом звеньев чистого запаздывания запишется так:
 5. Расчет регулятора исследуемого объекта
5. Расчет регулятора исследуемого объекта
Произведем расчет регулятора для системы, у которой производительность питателя на входе и дробилки на выходе. В качестве рассматриваемого объекта – щековая дробилка С-887, для которой
![]() т/ч,
т/ч, ![]() =2.11 т, Т1 =60 с, T2 = 30 c, τ1 = 2 c, τ2 = 1 c.
=2.11 т, Т1 =60 с, T2 = 30 c, τ1 = 2 c, τ2 = 1 c.
Передаточная функция объекта равна
После разложения экспоненты в ряд Паде получим: ![]() =
=![]()
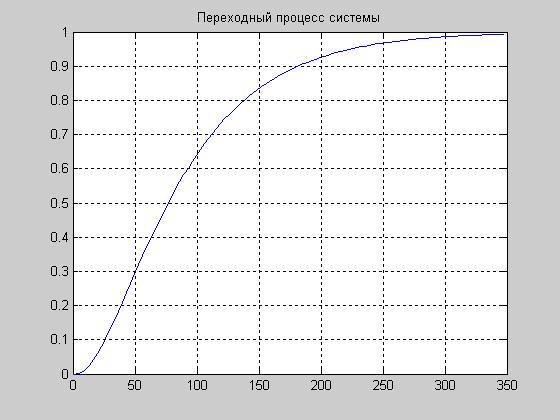
Рис. 5.1. Переходный процесс системы.
5.1 Расчет регулятора методом РЧХ
Согласно этому методу, расчетные формулы для настроек регулятора замкнутой системы, представленной на рис. 5.2, получают из условия, аналогичного критерию Найквиста.
 |
Если разомкнутая система имеет степень колебательности не ниже заданной, то замкнутая систем будет обладать заданной степенью колебательности в том случае, когда расширенная КЧХ разомкнутой системы ![]() проходит через точку с координатами
проходит через точку с координатами ![]() , т.е.
, т.е.
![]() ,
,
где ![]() (1)
(1)
Уравнение (1) равносильно двум уравнениям, записанным относительно расширенных АЧХ и ФЧХ объекта и регулятора, а именно:
 (2)
(2)
Для заданных частотных характеристик объекта и выбранного закона регулирования при решении системы уравнений (2) находят вектор настроек регулятора S, обеспечивающих заданную степень колебательности на каждой частоте.
Самыми распространенными регуляторами являются П, ПИ и ПИД поэтому рассчитаем коэффициенты для данных регуляторов и выберем из них по переходному процессу наиболее оптимальный.
Формулы для расчета коэффициентов регуляторов получают из системы:
П: