Реферат: Быстродействующий адаптивный наблюдатель в системе компенсации неизвестного запаздывания
Настоящая работа посвящена построению системы компенсации неизвестного запаздывания. Наличие большого запаздывания, как известно [1], отрицательно сказывается на работоспособности системы управления.
Для компенсации неизвестного запаздывания разработана адаптивная система, состоящая из быстродействующего адаптивного наблюдателя, вычисляющего оценки неизвестных параметров и запаздывания системы управления, и прогнозатора Смита, компенсирующего это запаздывание.
Центральным моментом работы является построение алгоритма быстродействующего адаптивного наблюдателя для оценивания неизвестного запаздывания, так как прогнозатор Смита применим лишь в тех случаях, когда запаздывание априори известно. Этот алгоритм основан на использовании метода настраиваемой модели. Суть алгоритма изложена ниже.
Пусть поведение интересующего нас объекта описывается следующим дифференциальным уравнением:
![]() , (1)
, (1)
![]() ;
; ![]()
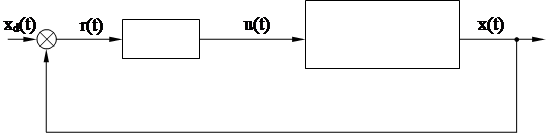
Здесь a1=3, a0=2 - известные постоянные коэффициенты; ![]() - неизвестные постоянные. Тогда структурная схема соответствующего процесса управления будет иметь вид, представленный на рис. 1. Здесь приборному измерению доступны вход xd(t) и выход x(t) системы управления.
- неизвестные постоянные. Тогда структурная схема соответствующего процесса управления будет иметь вид, представленный на рис. 1. Здесь приборному измерению доступны вход xd(t) и выход x(t) системы управления.
Построим быстродействующий адаптивный наблюдатель для идентификации неизвестных параметров системы ![]() , а также прогнозатор Смита для компенсации запаздывания
, а также прогнозатор Смита для компенсации запаздывания ![]() , после чего будем подставлять получаемые наблюдателем оценки
, после чего будем подставлять получаемые наблюдателем оценки ![]() в прогнозатор.
в прогнозатор.
![]()

–
Рис 1. Система управления для объекта с неизвестным запаздыванием.
![]()
y(t)
v(t) –
![]() +
+
–
![]()
![]()
–
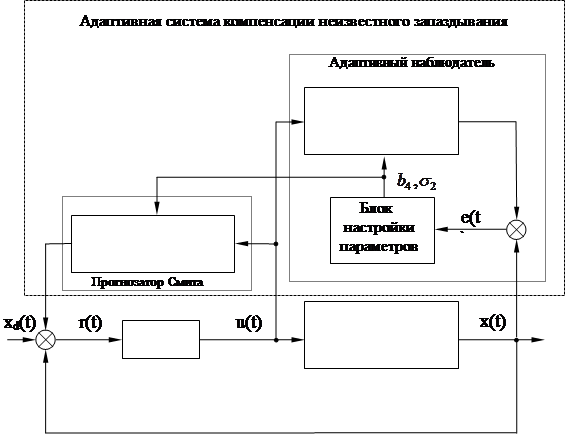
Рис. 2. Адаптивная система компенсации неизвестного запаздывания.
На каждом из подынтервалов времени функционирования системы Jj настраиваемую модель опишем следующими уравнениями:
![]()
![]() (2)
(2)
![]() ,
,
где ![]() - параметры модели, настраиваемые соответственно на параметры
- параметры модели, настраиваемые соответственно на параметры ![]() объекта (1).
объекта (1).
Введем ошибку e(t) = x(t) - y(t).
Конечная структурная схема системы управления с адаптивным наблюдателем и прогнозатором Смита показана на рис. 2.
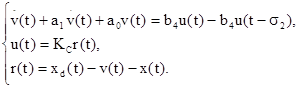
Система уравнений для выходного сигнала прогнозатора Смита v(t) и входного сигнала объекта, прогнозатора и наблюдателя u(t):
Уравнение для ошибки e(t) будет иметь вид (вычитаем (2) из (1) и линеаризуем правую часть):
--> ЧИТАТЬ ПОЛНОСТЬЮ <--