Реферат: Динамические характеристики объектов регулирования
В этом случае необходимо определить лишь один параметр объекта - скорость разгона ![]() . Она может быть определена, как и ранее, по тангенсу угла наклона прямой разгона на участке Dt к оси времени, т.к.
. Она может быть определена, как и ранее, по тангенсу угла наклона прямой разгона на участке Dt к оси времени, т.к. ![]() (
(![]() при k=1).
при k=1).
Но ![]() , отсюда
, отсюда ![]() ,
,
Или ![]() , где
, где ![]() , -площадь занятая импульсом воздействия
, -площадь занятая импульсом воздействия
Для одноемкостного ОР с самовыравниванием импульсная характеристика будет иметь вид, приведенный на (Рис. 7,б). В этом случае необходимо определить не только скорость разгона ![]() (время разгона
(время разгона ![]() ), но и степень самовыравнивания ОР-
), но и степень самовыравнивания ОР-![]() (коэффициент передачи
(коэффициент передачи ![]() ).
).
Скорость разгона ![]() можно определить как для одноемкостного ОР без самовыравнивания, но ее значение будет приближенным, так как для ОР с самовыравниванием кривая (1) в интервале
можно определить как для одноемкостного ОР без самовыравнивания, но ее значение будет приближенным, так как для ОР с самовыравниванием кривая (1) в интервале ![]() экспонента, а не прямая.
экспонента, а не прямая.
Тогда ![]() ;
;  .
.
После снятия импульсного воздействия регулируемая величина возвращается к первоначальному значению (кривая 2). Уравнение этой кривой является уравнением экспоненты ![]() , в котором искомые
, в котором искомые ![]() и
и ![]() .
.
Проинтегрируем это уравнение
 ,
,
знак (-) говорит о том, что кривая нисходящая,
![]() - площадь под экспонентой возврата (3)
- площадь под экспонентой возврата (3)
В конечных значениях ![]() , тогда
, тогда ![]() , но
, но ![]() , значит
, значит ![]() ,
, ![]() ;
; ![]() .
.
Импульсная характеристика многоемкостного ОР. На рис. 8 приведена импульсная характеристика многоемкостного ОР с самовыравниванием.
Реальный импульс воздействия обычно имеет не прямоугольную, а трапецеидальную форму, так как нанесение воздействия и его снятие совершаются с конечной, хотя и большой скоростью.

Рис. 8 - Импульсная характеристика многоемкостного ОР
Время емкостного запаздывания ![]() можно определить как отрезок времени от (середины импульса) до точки перегиба восходящей ветви импульсной характеристики. Точка перегиба легко определяется, так как она отсекает площади
можно определить как отрезок времени от (середины импульса) до точки перегиба восходящей ветви импульсной характеристики. Точка перегиба легко определяется, так как она отсекает площади ![]() и
и ![]() , равные между собой. Определение величины
, равные между собой. Определение величины ![]() ,
, ![]() ,
, ![]() указанным выше способом тем точнее, чем короче импульс воздействия и чем больше при этом отклонение регулируемой величины
указанным выше способом тем точнее, чем короче импульс воздействия и чем больше при этом отклонение регулируемой величины ![]() . Динамические свойства объекта могут быть определены по его импульсной характеристике методом достраивания импульсной характеристики до разгонной кривой или методом планиметрирования импульсной характеристики (Рис. 9).
. Динамические свойства объекта могут быть определены по его импульсной характеристике методом достраивания импульсной характеристики до разгонной кривой или методом планиметрирования импульсной характеристики (Рис. 9).
Метод достраивания импульсной характеристики . Разгонную характеристику можно построить по импульсной, пользуясь тем, что в случае линейности статических характеристик объекта регулирования отклонение регулируемого параметра, полученное в результате нескольких воздействий, равно в каждый данный момент времени алгебраической сумме отклонений регулируемой величины вследствие каждого из воздействий в отдельности. Это является следствием аддитивности (или наложения) переходных функций. На этом основании импульсную характеристику можно представить как алгебраическую сумму двух одинаковых, но противоположных по направлению кривых отклонений параметра ![]() и
и ![]() , из которых вторая запаздывает по сравнению с первой на
, из которых вторая запаздывает по сравнению с первой на ![]() , то есть на величину длительности действия импульсного воздействия.
, то есть на величину длительности действия импульсного воздействия.
Построение разгонной характеристики по импульсной производят в следующем порядке.
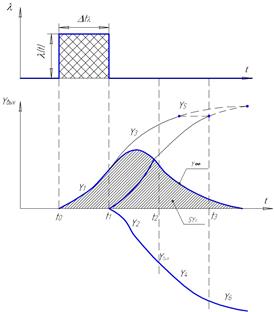
Рис. 9 - Обработка импульсной характеристики
На оси времени t отмечают отрезки времени ![]() и т.д.
и т.д.
На отрезке ![]() импульсная характеристика совпадает с кривой разгона -
импульсная характеристика совпадает с кривой разгона -![]() . С момента времени
. С момента времени ![]() начинается кривая
начинается кривая ![]() , участок которой на отрезке времени от
, участок которой на отрезке времени от ![]() до
до ![]() в точности соответствует участку кривой
в точности соответствует участку кривой ![]() на предыдущем отрезке времени от
на предыдущем отрезке времени от ![]() до
до ![]() . Кривая
. Кривая ![]() на отрезке времени от
на отрезке времени от ![]() до
до ![]() может быть достроена как сумма кривых
может быть достроена как сумма кривых ![]() и
и ![]() . По найденному дополнительному отрезку
. По найденному дополнительному отрезку ![]() продолжается кривая
продолжается кривая ![]() на отрезке времени
на отрезке времени ![]() и т.д. В результате получают кривую разгона
и т.д. В результате получают кривую разгона ![]() .
.
Метод планиметрирования импульсной характеристики. В некоторых производственных условиях, когда значительные нарушения режима особо нежелательны, приходится ограничивать даже импульсное воздействие. При этом допустимая длительность воздействия ![]() становится настолько малой, что достраивание разгонной характеристики оказывается громоздким и практически недостаточно точным. В этих случаях целесообразно прибегнуть к другому способу обработки импульсной характеристики, а именно, к определению параметров ОР непосредственно по величине площади, ограниченной импульсной характеристикой. Имея ввиду представленные выше зависимости находят
становится настолько малой, что достраивание разгонной характеристики оказывается громоздким и практически недостаточно точным. В этих случаях целесообразно прибегнуть к другому способу обработки импульсной характеристики, а именно, к определению параметров ОР непосредственно по величине площади, ограниченной импульсной характеристикой. Имея ввиду представленные выше зависимости находят
![]() ;
; ![]()
![]() - время переходного запаздывания, при
- время переходного запаздывания, при ![]() .
.
Постоянная времени объекта ![]() ;
;
Скорость разгона ![]() .
.
Частотные характеристики объектов регулирования