Реферат: Электромеханика
поперечной реакции якоря может быть настолько большим, что получить
характеристику вида 1 (рис. 8) невозможно. Тогда для получения
такой характеристики на полюсах помещают слабую последовательную обмотку
возбуждения согласного включения, н. с. которой составляет до 10% от н. с.
параллельной обмотки возбуждения. При этом уменьшение Фδ
под воздействием поперечной реакции якоря частично или полностью компенсируется.
Такую последовательную обмотку возбуждения называют стабилизирующей, а
двигатель с такой обмоткой по-прежнему называется двигателем -параллельного
возбуждения.
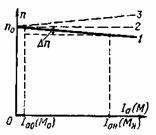
Изменение скорости вращения
Δn (рис. 8) при переходе от холостого хода (Ia
=Ia0) к номинальной нагрузке (Ia
=Iaн) у двигателя параллельного возбуждения при
работе на естественной характеристике мало и составляет 2—8% от nн
. Такие слабо падающие характеристики называются жесткими. Двигатели
параллельного возбуждения с жесткими характеристиками применяются в установках,
в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась
приблизительно постоянной (металлорежущие станки и пр.).
Рис. 8. Виды естественных скоростных и механических характеристик двигателя
параллельного возбуждения
Регулирование скорости посредствам ослабленного магнитного потока
производится обычно с помощью реостата в цепи возбуждения Rp
в (см. рис. 11). При отсутствии добавочного сопротивления в цепи якоря
(Rpa= 0) и U = const характеристики n =f(I
a) и n=f(M), определяемые равенствами (6) и (7), для разных
значений Rр.в. ,IB или Фδ
имеют вид, показанный на рис. 9. Все характеристики n =f(Ia)
сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе