Реферат: Фазові кутові моноімпульсні системи
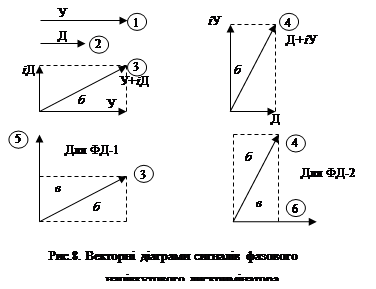
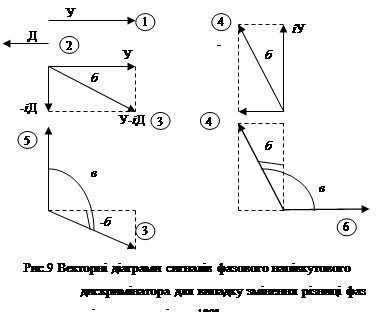
Для випадку відхилення цілі від напрямку осі антени в протилежну сторону, різниця фаз цих сигналів, як очевидно з рис. 9, змінюється на 180˚ (рис. 9, вектори 1 і 2 ). Після перетворення високочастотних сигналів у проміжну частоту, їхнього підсилення і «м’якого» обмеження в логарифмічних підсилювачах проміжної частоти (ППЧ-ЛОГ) сигнали надходять до фазових детекторів ФД-1 і ФД – Опорною напругою для цих ФД служить сумарний сигнал У, який отримав перед тим такі самі перетворення, що і сигнали У+i Д і Д+i У, і сумарний сигнал i У, зсунутий попередньо за фазою на +90°.
В схемі використані так називані «косинусні» ФД, у яких вихідна напруга визначається не синусною, а косинусною залежністю від фазового кута між векторами сигналів вхідної й опорної напруг. Ці детектори схемно відрізняються від «синусних» ФД тільки тим, що один із вхідних сигналів попередньо повернений за фазою на 90°.
Згідно з векторними діаграмами, наведеними на рис. 10,
![]() ;
;
![]() ;
;
![]() ;
;
![]() . (4)
. (4)
Для векторних діаграм, наведених на рис. 10, b=90°+a.
Отже, ![]() .
.
Тоді
![]() ;
;
![]() .
.
З цих виразів витікає, що знак пеленгаційної функції міститься у самій функції і вживати спеціальні заходи для визначення сторони відхилення цілі від напрямку осі антени, як це робилося в амплітудних ФД, немає потреби.
Якщо припустити, що сумарна і різницева ДН амплітудного пеленгатора визначаються виразами (4) і (5), то вираз пеленгаційної характеристики напівкутового фазового дискримінатора, що працює разом із сумарно-різницевим амплітудним пеленгатором, матиме вигляд
![]() .
.
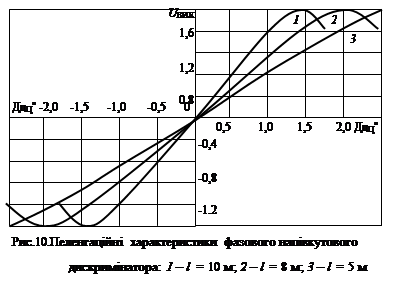
Графіки цієї функції наведені на рис. 10.
Графіки обраховані за умови, що довжина робочої хвилі бортових відповідачів дорівнює 27,5 см, а розкриви антенних ґраток у поземному напрямку дорівнюють відповідно 10; 8 і 5 м. Як очевидно з рисунку, на відміну від пеленгаційних характеристик кутового фазового дискримінатора (див. рис. 8) робочий сектор однозначного визначення відхилення цілі від напрямку осі антени в цьому випадку практично обмежується лише шириною ДН сумарного променя антени і припустимої зміни крутизни пеленгаційної характеристики.
 |
Деяке ускладнення схеми напівкутового дискримінатора, пов’язане з необхідністю введення третього каналу для сумарного сигналу, двох ФД і додаткових перетворювачів фаз, не принципове. Основним недоліком аналізованої схеми, як і для кутового фазового дискримінатора, є необхідність стабілізації фазових співвідношень сигналів у всіх трьох каналах. Нестабільність фази може призвести до прямих помилок визначення азимутального положення цілі. Усувається цей недолік в сучасних моноімпульсних ВРЛ раціональністю рішень під час розробки і виготовлення апаратури приймачів, а також застосуванням контрольних відповідачів і спеціальних каліброваних пілот-сигналів, за якими провадиться постійна корекція фазових характеристик дискримінаторів.
На разі принцип напівкутового фазового визначення азимутального положення цілей використовується в радіолокаторах RSM 970 (Thomson-CSF, Thales, Франція), RSM 970S (Airsys ATM, Франція), IRS-20 MP/L (Indra-Іспанія), MSSR/Mode S (Northrop Grumman, США), S-470 Messenger (Marconi Radar Systems, Англія), CM SSR-401 (Cardion Electronics, США) і в деяких інших радіолокаторах.