Реферат: Графический метод и симплекс-метод решения задач линейного программирования
p1 : 3 x1 + x2 = 9,
p2 : x1 + 2 x2 = 8,
p3 : x1 + 6 x2 = 12.
Подставляя координаты точки (0,0) в неравенства (1.8)-(1.10) видим, что начало координат им не удовлетворяет и, следовательно, не входит в множество планов Х . Поэтому штриховки направлены выше и правее граничных прямых. Выделяя точки, удовлетворяющие всем неравенствам и условиям неотрицательности, получаем множество планов, изображенное на рис. 1.2. В данном примере оно не ограничено.
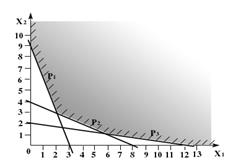
Рис. 1.2
Изобразим целевую функцию (1.7) с помощью линий уровня. Для этого достаточно построить целевой вектор c = (5, 4) и перпендикулярно ему провести несколько прямых на множестве Х. Поскольку целевой вектор указывает направление возрастания целевой функции, а в задаче о рационе требуется найти ее минимум, то для нахождения оптимального решения будем перемещать линию уровня параллельно самой себе по множеству Х в направлении, противоположном целевому вектору.

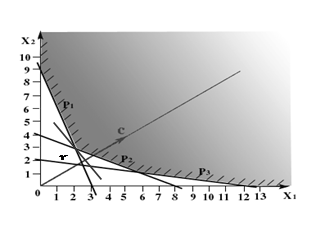
Рис. 1.3
Последней точкой множества планов, через которую еще проходит линия уровня будет точка пересечения прямых p1 и p2 . Решая систему уранений (рис. 1.3).
3 x1 + x2 = 9
x1 + 2 x2 = 8
получим оптимальный план x1 * = 2, x2 * = 3. Минимальное значение целевой функции при этом будет равно
f(x*) = 5∙2 + 4∙3 = 22.
Следовательно, самый дешевый набор для профилактического приема состоит из 2 гр . комплекса А и 3 гр . комплекса В , и его стоимость равна 22 руб.
Теперь несложно сформулировать геометрический способ решения стандартных задач ЛП с двумя переменными:
· изображается допустимый многоугольник ![]() – пересечение полуплоскостей, являющихся решениями соответствующих неравенств;
– пересечение полуплоскостей, являющихся решениями соответствующих неравенств;
· изображается целевой вектор ![]() ;
;
· через допустимое множество проводится перпендикуляр к целевому вектору – это линия уровня целевой функции;
· путем перемещения линии уровня параллельно самой себе в направлении целевого вектора до тех пор, пока ![]() не окажется по одну сторону от перемещаемой прямой, визуально определяется точка (или точки) максимума;
не окажется по одну сторону от перемещаемой прямой, визуально определяется точка (или точки) максимума;
· вычисляются координаты точки максимума (решением соответствующей системы уравнений, задающих прямые, точка пересечения которых и есть искомая точка) и максимальное значение целевой функции.
Замечание. Для определения точки минимума следует перемещать изолинию против направления целевого вектора.
В разобранных примерах оптимальный план находился в единственной вершине многоугольника допустимых планов. Однако при решении задач ЛП могут встретиться и другие случаи.
Бесконечное множество оптимальных планов. На рис.1.4 целевая функция принимает одно и то же максимальное значение в любой точке отрезка AB , соединяющего две вершины множества планов Х . Такая ситуация возникает, если линии уровня параллельны граничной прямой.
Отсутствие ограниченного решения . На рис.1.5 изображен случай, когда целевая функция не ограничена сверху на множестве планов и решение задачи на максимум не существует. При этом решение задачи на минимум может существовать, (как в задаче о витаминах).
Отсутствие допустимых планов. На рис.1.6 области, допустимые по каждому из ограничений, не имеют общих точек. В этом случае говорят, что ограничения несовместны, множество планов пусто и задача ЛП решения не имеет.



Рис. 1.4 Рис. 1.5 Рис. 1.6
2. Симплекс-метод
2.1 Идея симплекс-метода
Рассмотрим универсальный метод решения канонической задачи линейного программирования