Реферат: Имитационное биомеханическое моделирование как метод изучения двигательных действий человека
2) в том случае, если моделируются движения, у которых отсутствуют быстрые изменения скоростей, например: бег на коньках, плавание, бег на лыжах, то при построении кинетограммы подобных локомоций на ЭВМ можно использовать гладкие функции типа полиномов: алгебраического или интерполяционного сплайна [29], сглаживающих сплайнов 3-й или 5-й степени.
Начало свободного проката (А)

Начало одноопорного отталкивания (Б)
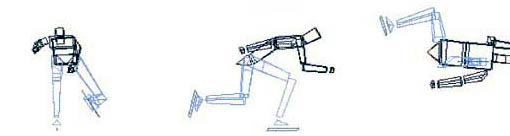
Начало двухопорного отталкивания (В)

Рис. 1. Базисные кинематические положения при моделировании бега на коньках
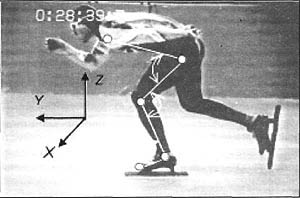
Рис. 2. Положительное направление моментов в суставах толчковой ноги
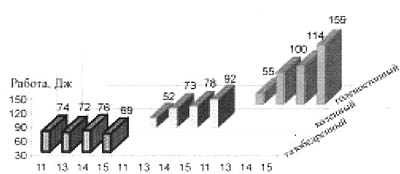
Рис. 3. Механическая работа в суставах толчковой ноги относительно оси X инерциального базиса при разной скорости бега на коньках
Необходимо отметить, что математические зависимости, описывающие кинематику модели (сплайны, тригонометрические полиномы), весьма чувствительны к способу задания начальных (базисных) кинематических данных и к краевым условиям [35]. Например, произвольность по времени между базисными точками может привести к тому, что кинетограмма модели станет существенно отличаться от реального движения.
Для того чтобы избежать искажения кинематики в имитационной модели перед ее созданием поступили следующим образом:
а) исследовали кинематику моделируемой локомоции (бег на коньках по прямой) с помощью видеорегистрирующей методики. Наличие исходных кинематических данных с дискретностью 40 мс (частота видеорежима PAL) дает возможность с приемлемой точностью определить кинематические параметры модели;
б) чтобы краевые условия не влияли на скорость и ускорение изучаемого движения, справа и слева от изучаемого цикла задавали дополнительно не менее трех фаз [41].
Трехмерная имитационная модель локомоций человека (на примере бега на коньках). Пространственная имитационная модель локомоций человека была реализована для бега на коньках по прямой. Уравнения модели, описывающие трехмерное движение звеньев тела, даны в [10]. Построение имитационной модели проходило в несколько этапов:
1. На первом этапе определили масс-инерционные характеристики сегментов тела конькобежца : массы, моменты инерции звеньев, положения центров масс и биомеханические длины звеньев [7, 9].
2. На втором этапе исследовали особенности движения конькобежца в двухопорной фазе. Для этого оценили величину поперечного смещения звеньев тела конькобежца, рассчитали центробежную силу, действующую на толчковый конек, и тем самым ввели ограничения на "разгрузку толчковой ноги" в двухопорной фазе. При расчете загрузки опорной ноги и моментов в суставах применяли уравнения из работы [5].
3. На третьем этапе определили аэродинамическое сопротивление сегментов тела конькобежца. Включение в модель аэродинамических сил необходимо, так как аэродинамическое сопротивление - основная тормозящая сила, действующая на конькобежцев. Коэффициенты аэродинамического сопротивления Сх для разных форм посадки конькобежцев в зависимости от скорости и вида бега: с руками или без рук, по прямой или по повороту - составили от 0,75 до 1,2 [8, 38]. Суммарная величина сопротивления воздуха для всего тела конькобежца (сила, приложенная к ОЦМ) в зависимости от формы посадки при скорости бега 15 м/c составляет 45-61 Н. Наибольшее воздействие силы аэродинамического сопротивления приходится на туловище - около 30% от суммарной силы. Аэродинамическое сопротивление голени и бедра ног не превышает 10 Н.
4. На четвертом этапе рассчитали кинематические характеристики имитационной модели бега на коньках. К ним относятся: длина шага, длительность фаз: свободного проката, одноопорного отталкивания и двухопорного отталкивания; средняя скорость по фазам, ширина "елочки", формы посадки конькобежцев.
Выше было сказано, что способ задания базисных точек кинетограммы существенно влияет на скорости и ускорения изучаемого движения и, значит, на результаты решения ОЗД. При моделировании бега на коньках для более точного задания линейных и угловых характеристик локомоций использовали данные видеосъемки конькобежцев. Перед тем как создать кинетограмму бега на ЭВМ, сначала методом биомеханической видеосьемки и компьютерных программ определяли углы, угловые скорости в суставах в трех положениях: в начале фазы "свободного проката" (рис. 1А); в начале одноопорного отталкивания (рис. 1Б); в начале двухопорного отталкивания (рис. 1В); в завершении двухопорного отталкивания (рис. 1Б).
Зная расстояние между масштабными метками на дорожке, определяли путь и среднюю скорость тазобедренного сустава (полюса модели) между базисными точками в продольном направлении.
Аналогичную последовательность в обработке кадров применяли и для видеоряда поперечных движений конькобежцев.
5. На пятом этапе в компьютерную модель включили данные по анатомическому строению мышц нижней конечности конькобежцев - точки крепления мышцы к костям, физиологический поперечник, длины мышечной и сухожильной частей, состав волокон; угол перистости [9].
6. На шестом этапе решали обратную задачу - определения динамики для 16-звенной пространственной модели тела человека.
Выходные параметры модели. В результате компьютерного моделирования бега на коньках определяли следующие биомеханические параметры:
а) управляющие (суставные) моменты;
б) механическую работу и мощность , развиваемую в суставах;