Реферат: Имитационные модели
Имитационное моделирование используют в основном для следующих применений:
1) при исследовании сложных внутренних и внешних взаимодействий динамических систем с целью их оптимизации. Для этого изучают на модели закономерности взаимосвязи переменных, вносят в модель изменения и наблюдают их влияние на поведение системы;
2) для прогнозирования поведения системы в будущем на основе моделирования развития самой системы и ее внешней среды;
3) в целях обучения персонала, которое может быть двух типов: индивидуальное обучение оператора, управляющего некоторым технологическим процессом или устройством, и обучение группы людей, осуществляющих коллективное управление сложным производственным или экономическим объектом.
В системах обоих типов комплекс программ задает некоторую обстановку на объекте, однако между ними имеется существенное различие. В первом случае программное обеспечение имитирует функционирование объектов, описываемых технологическими алгоритмами или передаточными функциями; модель ориентирована на тренировку психофизиологических характеристик человека, поэтому такие модели называются тренажерами. Модели второго типа гораздо сложнее. Они описывают некоторые аспекты функционирования предприятия или фирмы и ориентированы на выдачу некоторых технико-экономических характеристик при воздействии на входы чаще всего не отдельного человека, а группы людей, выполняющих различные функции управления;
4) для макетирования проектируемой системы и соответствующей части управляемого объекта с целью прикидочной проверки предполагаемых проектных решений. Это позволяет в наиболее наглядной и понятной заказчику форме продемонстрировать ему работу будущей системы, что способствует взаимопониманию и согласованию проектных решений. Кроме того, такая модель позволяет выявить и устранить возможные неувязки и ошибки на более ранней стадии проектирования, что на 2–3 порядка снижает стоимость их исправления.
2. Имитационные модели производственных процессов
Вид модели производственного процесса зависит в значительной степени от того, является ли он дискретным или непрерывным. В дискретных моделях переменные изменяются дискретно в определенные моменты имитационного времени. Время может приниматься как непрерывным, так и дискретным в зависимости от того, могут ли дискретные изменения переменных происходить в любой момент имитационного времени или только в определенные моменты. В непрерывных моделях переменные процесса являются непрерывными, а время может быть как непрерывным, так и дискретным в зависимости от того, являются непрерывные переменные доступными в любой момент имитационного времени или только в определенные моменты. В обоих случаях в модели предусматривают блок задания времени, который имитирует продвижение модельного времени, обычно ускоренного относительно реального.
Разработка имитационной модели и проведение моделирующих экспериментов в общем случае могут быть представлены в виде нескольких основных этапов, приведенных на рис. 1.

Рис. 1
Компонента модели, отображающая определенный элемент моделируемой системы, описывает набором характеристик количественного или логического типа. В зависимости от длительности существования различают компоненты условно-постоянные и временные. Условно-постоянные компоненты существуют в течение всего времени эксперимента с моделью, а временные – генерируются и уничтожаются в ходе эксперимента. Компоненты имитационной модели делят на классы, внутри которых они имеют одинаковый набор характеристик, но отличаются их значениями.
Состояние компоненты определяется значениями ее характеристик в данный момент модельного времени, а совокупность значений характеристик всех компонент определяет состояние модели в целом.
Изменение значений характеристик, являющееся результатом отображения в модели взаимодействия между элементами моделируемой системы, приводит к изменению состояния модели. Характеристика, значение которой в ходе моделирующего эксперимента изменяется, является переменной, в противном случае это параметр. Значения дискретных переменных не изменяются в течение интервала времени между двумя последовательными особыми состояниями и меняются скачком при переходе от одного состояния к другому.
Моделирующий алгоритм представляет собой описание функциональных взаимодействий между компонентами модели. Для его составления процесс функционирования моделируемой системы разбивается на ряд последовательных событий, каждое из которых отражает изменение состояния системы в результате взаимодействия ее элементов или воздействия на системы внешней среды в виде входных сигналов. Особые состояния возникают в определенные моменты времени, которые планируются заранее, либо определяются в ходе эксперимента с моделью. Наступление событий в модели планируется путем составления расписания событий по временам их свершения либо проводится анализ, выявляющий достижение переменными характеристиками установленных значений.
Для этой цели наиболее удобно использовать СИВС. Представленные на них материальные и информационные потоки легко анализировать для выявления особых состояний. Такими состояниями являются отражаемые на СИВС моменты окончания обработки изделия на каждом рабочем месте или его транспортировки; приема и выдачи на постоянное или временное хранение; сборки деталей в узлы, узлов в изделие и т.п. Для дискретного производства изменение характеристик между особыми состояниями можно также считать дискретным, имея в виду переход условным скачком от исходного материала к заготовке, от заготовки к полуфабрикату, от полуфабриката к детали и т.д.
Таким образом, каждая производственная операция рассматривается как оператор, изменяющий значение характеристик изделия. Для простых моделей последовательность состояний можно принимать детерминированной. Лучше отражают действительность случайные последовательности, которые можно формализовать в виде случайных приращений времени, имеющих заданное распределение, либо случайного потока однородных событий, аналогично потокам заявок в теории массового, обслуживания. Аналогичным образом можно проанализировать и выявить с помощью СИВС особые состояния при движении и обработке информации.
На рис. 2 представлена структура обобщенной имитационной модели.
При моделировании непрерывных производственных процессов по принципу ∆t датчик временных интервалов выдает тактовые импульсы для работы моделирующего алгоритма. Блоки случайных и управляющих воздействий, а также начальных условий служат для ручного ввода условий проведения очередного модельного эксперимента.
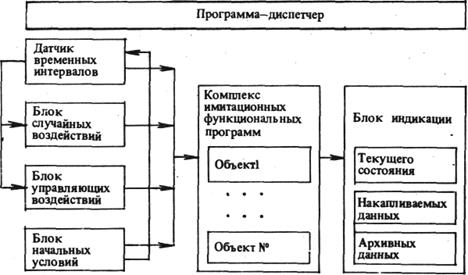
Рис. 2
Комплекс имитационных функциональных программ по каждому моделируемому объекту определяет условное распределение вероятностей состояний объекта к окончанию каждого момента ДЛ При случайном выборе одного из возможных состояний это осуществляется функциональной подпрограммой; при выборе экспериментатором – программой, заложенной в блоке управляющих воздействий, или, при желании осуществлять этот выбор вручную на каждом такте, вводом новых начальных условий исходя из текущего состояния, определяемого с помощью блока индикации.
Функциональная программа определяет параметры технологической установки на каждом такте в зависимости от заданных начальных условий – характеристик сырья, заданного режима, свойств и условий работы установки. Из модели технологической части программным путем могут быть добавлены соотношения весового и объемного баланса.
Координацию и взаимодействие всех блоков и программ осуществляет программа-диспетчер.
При моделировании дискретных процессов, при котором обычно используют принцип особых состояний, структура имитационной модели изменяется незначительно. Вместо датчика временных интервалов вводится блок, определяющий наличие особого состояния и выдающий команду на переход к следующему. Функциональная программа имитирует на каждом переходе одну операцию на каждом рабочем месте. Характеристики таких операций могут быть детерминированными во времени, например при работе станка-автомата, либо случайными с заданными распределениями. Кроме времени могут имитироваться и другие характеристики – наличие или отсутствие брака, отнесение к некоторому сорту или классу и т.п. Аналогично имитируются сборочные операции, с той разницей, что на каждой операции изменяются не характеристики обрабатываемого материала, а вместо одних наименований – детали, узлы – появляются другие – узлы, изделия – с новыми характеристиками. Однако принципиально операции сборки имитируются аналогично операциям обработки – определяются случайные или детерминированные затраты времени на операцию, значения физических и производственных характеристик.
3. Имитационные модели предприятий и производственных объединений
Для имитации сложных производственных систем требуется создание логико-математической модели исследуемой системы, позволяющей проведение с нею экспериментов на ЭВМ. Модель реализуют в виде комплекса программ, написанных на одном из универсальных языков программирования высокого уровня либо на специальном языке моделирования. С развитием имитационного моделирования появились системы и языки, сочетающие возможности имитации как непрерывных, так и дискретных систем, что позволяет моделировать сложные системы типа предприятий и производственных объединений.
При построении модели, прежде всего, следует определить ее назначение. В модели должны быть отражены все существенные с точки зрения цели ее построения функции моделируемого объекта и в то же время в ней не должно быть ничего лишнего, иначе она будет слишком громоздкой и мало эффективной.
Основным назначением моделей предприятий и объединений является их исследование с целью совершенствования системы управления либо обучения и повышения квалификации управленческого персонала. При этом моделируется не само производство, а отображение производственного процесса в системе управления.