Реферат: Классический метод математического описания и исследования многосвязных систем
Управляемая подсистема по каналу “![]() ” – элемент прямого действия. Рассогласование
” – элемент прямого действия. Рассогласование ![]() вводится в управляющее устройство в виде
вводится в управляющее устройство в виде ![]()
![]() , то есть сумматор (элемент сравнения) является элементом обратного действия. Следовательно, канал управляющей подсистемы в рассматриваемом контуре должен содержать элемент прямого действия.
, то есть сумматор (элемент сравнения) является элементом обратного действия. Следовательно, канал управляющей подсистемы в рассматриваемом контуре должен содержать элемент прямого действия.
2. Составление уравнения динамики многомерной САУ и определение ее характеристического уравнения.
Заданные уравнения (1.2.12), (1.2.13) в общем виде можно записать как
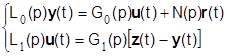 . (1.2.14)
. (1.2.14)
Исключив из системы уравнений (1.2.14) промежуточную переменную u, получим
![]() (1.2.15)
(1.2.15)
Перенося в левую часть уравнения многочлен от y(t) и оставляя в правой части многочлены от независимых переменных z(t), r(t) и учитывая, что ![]() , получим уравнение динамики
, получим уравнение динамики
![]()
![]() (1.2.16)
(1.2.16)
Характеристическое уравнение
![]() . (1.2.17)
. (1.2.17)
Задача 1.1.3
Математические модели динамических режимов управляемой и управляющей подсистем в переменных "вход–выход" описываются дифференциальными уравнениями вида:
а) управляемая подсистема
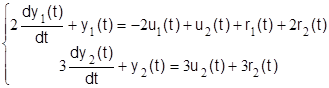 , (1.2.24)
, (1.2.24)
при нулевых начальных условиях;
б) управляющая подсистема
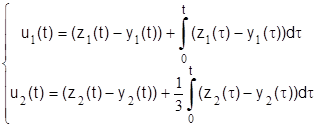 , (1.2.25)
, (1.2.25)
где yi(t), ui(t), ri(t), zi(t) – выходные, управляющие, возмущающие переменные и задающие воздействия соответственно.
Задание
1. Записать данные уравнения в символической форме и представить в векторно-дифференциальном виде;
Решение
Для записи данных уравнений в символическом виде необходимо обозначение производной заменить на символ р, то есть положить ![]() , а интеграл – на
, а интеграл – на ![]() . После замены получим
. После замены получим
а) управляемая подсистема
 , (1.2.26)
, (1.2.26)
б) управляющая подсистема
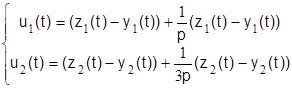 . (1.2.27)
. (1.2.27)
Вводя векторы y(t)=[y1(t), y2(t)]T, u(t)=[u1(t), u2(t)]T, r(t)=[r1(t), r2(t)]T и учитывая, что
 , (1.2.28)
, (1.2.28)
получим следующие уравнения: