Реферат: Методы предварительных эквивалентных преобразований и итерационные методы с минимизацией невязки для решения СЛАУ
Реферат « Введение в численные методы »
Тема: «Методы предварительных эквивалентных преобразований и итерационные методы с минимизацией невязки для решения СЛАУ»
1. Методы предварительных эквивалентных преобразований
1.1 Преобразование вращения
Следующий важный подход к решению алгебраических систем уравнений базируется на применении эквивалентных преобразований с помощью унитарных матриц, сводящем исходную матрицу к эквивалентной ей диагональной.
Смысл этого подхода состоит в том, чтобы последовательно, умножением слева и / или справа на специальные унитарные матрицы, превратить некоторые компоненты исходной матрицы в нуль.
Матрица S называется унитарной, если ее произведение со своей комплексно сопряженной равно единичной матрице. Это означает, что комплексно сопряженная матрица равна обратной матрице:
![]()
Известной унитарной матрицей является матрица вращения ,которая применяется для поворота на заданный угол вектора, принадлежащего некоторой плоскости, вокруг начала координат. В двумерном случае вектор ![]() поворачивается на угол
поворачивается на угол ![]() путем умножения на матрицу
путем умножения на матрицу
![]()
Чтобы сохранить эквивалентность результирующей матрицы при умножении ее на матрицу вращения, необходимо исходную матрицу умножать справа на ![]() и слева на
и слева на ![]() . Умножение же матрицы вращения на вектор дает такой же по величине вектор, но повернутый на заданный угол.
. Умножение же матрицы вращения на вектор дает такой же по величине вектор, но повернутый на заданный угол.
Поворот вектора в многомерном пространстве на произвольный угол можно представить, как последовательность плоских вращений каждой проекции на некоторый угол. Если подобрать угол вращения так, чтобы в плоском повороте одну из проекций вектора совместить с координатной осью, то вторая проекция в этой плоскости становится равной нулю.
Частные повороты вектора в многомерном пространстве с помощью матрицы вращения можно выполнять, если ее расширить до матрицы размера ![]() следующим образом:
следующим образом:
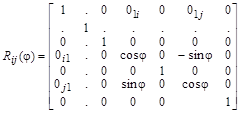 .
.
Индексы i, j обозначают матрицу вращения, поворачивающую вектор в плоскости ![]() на угол
на угол ![]() .
.
Теперь частное эквивалентное преобразование матрицы A вращением на угол ![]() записываются так:
записываются так:
![]() .
.
Условие превращения в нуль ij- тых элементов симметричной матрицы A можно получить методом неопределенных коэффициентов на двумерной матрице:
![]() .
.
![]() .
.
Угол поворота, при котором ![]() , находится из уравнения
, находится из уравнения
![]() .
.
Разделив на ![]() и обозначив
и обозначив ![]() ,
, ![]() , получим квадратное уравнение для тангенса требуемого угла поворота
, получим квадратное уравнение для тангенса требуемого угла поворота
![]() .
.
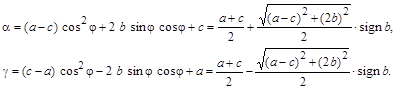
Из двух решений для тангенса выбирается такое, чтобы ![]() . В этом случае
. В этом случае ![]() . Подставив выражение для угла в соотношения для диагональных элементов, после тригонометрических преобразований получаются следующие формулы:
. Подставив выражение для угла в соотношения для диагональных элементов, после тригонометрических преобразований получаются следующие формулы:
Для получения результирующей матрицы выполнять матричное умножение трех матриц совсем необязательно. Структура матриц вращения вызывает при умножениях изменение только тех элементов исходной матрицы, которые находятся на i- той и j- той строчках и на i- том и j- том столбцах. Изменения представляются суммами элементов, стоящих в строчках и столбцах, умноженных на синус или косинус угла ![]() в соответствии с формулами, где j>i :
в соответствии с формулами, где j>i :
преобразования строк – 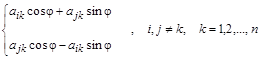 ;
;
преобразование столбцов –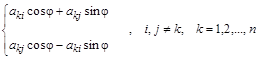 .
.
На пересечениях i -й строки и i- того столбца и j -й строки и j- того столбца располагаются соответственно вычисленные выше ![]() и
и ![]() , а на местах ij -того и ji -того элементов вставляются нули.
, а на местах ij -того и ji -того элементов вставляются нули.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--