Реферат: Многочастотные РЛС
Для принятия решения о наличии цели при этом способе сложения сигналов достаточно превышения порога сигналом хотя бы одного из частотных каналов приемника.
Если приемное устройство состоит из L частотных каналов, то вероятность одновременного превышения порога n каналов равна
 |
где DL n - вероятность одновременного превышения порога сигналами n из Lканалов; D0 - вероятность обнаружения цели отдельным каналом; (1-D0 ) - вероятность пропуска цели отдельным каналом; количество возможных комбинаций каналов, сигналы которых одновременно превышают порог
 |
Поскольку при линейном суммировании сигналов частотных каналов необходимым и достаточным условием правильного обнаружения цели является превышение порога сигналом хотя бы одного из каналов, то полная вероятность обнаружения цели многочастотной РЛС будет равна сумме вероятностей превышения порога сигналами одного, двух, трех и т. д. и, наконец, всех каналов приемника
![]()
С помощью аналогичных рассуждений можно найти зависимость полной ложной тревоги в многоканальном приемнике от вероятности ложной тревоги в отдельном канале при линейном суммировании сигналов
 |
или, учитывая, что F0 <<1:
F0 @LF0 .

На рис. 11 графически изображена зависимость вероятности обнаружения цели в многоканальном приемнике с линейным суммированием сигналов от вероятности обнаружения цели в отдельном канале при различном числе каналов. Из сравнения графиков зависимости Dc =f(D0 ) при различных значениях L можно заключить, что вероятность обнаружения цели при линейном суммировании сигналов тем выше, чем больше число частотных каналов приемника. Однако не следует забывать, что увеличение числа каналов связано с повышением также и ложной тревоги. Чтобы сохранить вероятность ложной тревоги в многоканальном приемнике такой же, как в отдельном канале, необходимо увеличить порог, что, естественно, приведет к снижению вероятности обнаружения цели.
При объединении сигналов частотных каналов приемника путем перемножения их амплитуд результирующий сигнал на выходе общего умножителя имеет вид
где U1 , U2 ,…, UL - амплитуды сигналов в соответствующих каналах приемника.
Необходимым условием правильного обнаружения цели в многоканальном приемнике с перемножением сигналов является превышение порога сигналами всех каналов. Очевидно, при этом вероятность обнаружения будет определятся формулой
![]() а вероятность ложной тревоги
а вероятность ложной тревоги
Таким образом, в многоканальном приемнике с перемножением сигналов вероятность обнаружения цели так же, как и вероятность ложной тревоги, тем выше, чем меньше число каналов приемника (рис. 11).
Способы объединения сигналов суммированием с последующим перемножением сумм и перемножением с последующим суммированием произведений представляют собой комбинации рассмотренных способов обработки многочастотного сигнала - линейного суммирования и перемножения сигналов.
4. Многочастотные РЛС
Находят применение два пути использования в станциях многочастотного излучения. Во-первых, можно осуществлять излучение на нескольких частотах в пределах одной и той же диаграммы направленности. При этом цель одновременно облучается радиоволнами на всех рабочих частотах. Станции, в которых реализован этот принцип, можно называть частотно-многоканальными, так как их основные показатели определяются совокупностью действия всех частотных каналов.

Рис. 1 Функциональная схема частотно - многоканальной РЛC
Второй путь использования нескольких частот излучения состоит в том, что на каждой частоте создается самостоятельная диаграмма направленности, смещенная относительно других в пространстве. Точечная цель в каждый данный момент находится в пределах одной из диаграмм (изредка — на стыке двух диаграмм) и облучается радиоволнами одной частоты. Радиолокационные станции, в которых используется этот принцип, не являются по сути дела многоканальными: они представляют собой как бы комбинацию нескольких независимых устройств, работающих на нескольких частотах.
В РЛС первого типа имеется несколько передатчиков, работающих на различных частотах f1 , f2 , . . ., fn и запускаемых общим синхронизирующим устройством (рис. 12). Высокочастотные колебания поступают в волноводный сумматор и затем подводятся к облучателю зеркала антенны. Таким образом создается один луч, в пределах которого излучаются радиоволны различной длины. Принятые сигналы от антенны поступают к п приемникам, предназначенным для раздельной обработки сигналов на разных частотах.
Выходные сигналы приемников подводятся к сумматору, где производится их совместная обработка; импульсы напряжения, образующиеся в результате этой дополнительной обработки, фиксируются на индикаторе или в другом выходном устройстве.
5. Помехозащищенность многочастотных РЛС
Одно из главных достоинств многочастотных РЛС — это их высокая помехозащищенность, что обусловлено, прежде всего, высокой помехоустойчивостью самого метода многочастотной радиолокации, а также применением специальных способов совместной обработки сигналов с разными несущими частотами, возможностями перераспределения излучаемой энергии между различными частотными каналами, выигрышем в пороговом отношении сигнал/шум. Определяющим из перечисленных факторов, безусловно, является помехоустойчивость метода многочастотной радиолокации, как следствие использования радиолокационных сигналов, занимающих достаточно широкий диапазон частот.
Эффективного подавления многочастотной РЛС можно добиться только путем постановки достаточно интенсивных узкополосных помех на каждой ее рабочей частоте. Это означает, что для противодействия многочастотной РЛС требуется в m раз больше передатчиков помех, чем для подавления одночастотной РЛС того же типа. В реальных условиях из - за отсутствия достоверной информации о технических характеристиках подавляемой РЛС можно ожидать, что одновременное воздействие узкополосных помех будет иметь место только на отдельных частотах многочастотной РЛС.
Если воздействие интенсивной помехи на любе рабочих частот РЛС расценивать как прекращение приема полезной информации по соответствующему частотному каналу РЛС из-за его выключения, то эффективность воздействия помехи на многочастотную РЛС можно характеризовать степенью ухудшения характеристик обнаружения РЛС в результате уменьшения числа ее рабочих частот [2]. Рис. 13 иллюстрирует характер и степень изменения дальности действия десятичастотной РЛС от числа подавленных помехой рабочих частот (mn ) при различных вероятностях обнаружения целей. Графики зависимости построены для двух режимов работы РЛС — с перестройкой частоты от импульса к импульсу (сплошные линии) и с одновременным излучением частот (пунктирные линии).
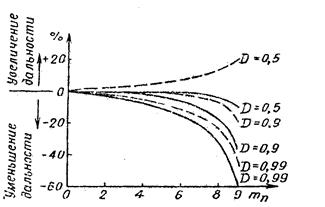
Рис. 13 Зависимость дальности действия десятичастотной РЛС от числа подавленных помехой рабочих частот