Реферат: Нелинейные САУ
В фазовом же пространстве никакая кривая (в том числе и предельный цикл) не может быть границей области.
Области ограничиваются сепаратрисными поверхностями, целиком состоящими из фазовых траекторий.
В результате для фазовой плоскости нахождение особых точек и предельных циклов часто решает задачу и об областях устойчивости «в большом». В фазовом же пространстве нужно для этого найти и сепаратрисные поверхности — задача чрезвычайно сложная.
2. В системах второго порядка колебания могут быть только периодическими на одной определённой частоте.
При более высоких порядках могут сосуществовать колебания разных частот, например:
![]()
Если частоты w и W не связаны целочисленным соотношением к w = т W(где к и т — целые числа), то сумма этих двух колебаний есть тоже колебание, но непериодическое.
Такое колебание в фазовом пространстве образует уже не замкнутую траекторию, а траекторию, полностью заполняющую некоторую замкнутую поверхность (например, тор — см. рис.5).
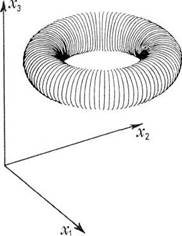
Рис.5. Тороидальная поверхность, образуемая колебаниями в системе третьего порядка
Устойчивость нелинейных систем «в малом», «в большом» и «в целом». Системы, эквивалентные устойчивым линейным. Абсолютная устойчивость
Задача расчёта нелинейной САУ может считаться полностью качественно решенной, если определены фазовые портреты, возможные в этой системе, и если в ее пространстве параметров определены бифуркационные границы. Количественное решение задачи требует, кроме того, определения формы и расположения предельных циклов и сепаратрис (или сепаратрисных поверхностей) для каждой точки пространства параметров.
Аналитически столь полно решить нелинейную задачу удается лишь в отдельных частных случаях и, как правило, при существенной идеализации задачи.
С геометрической точки зрения, первая задача состоит в выделении нелинейных систем, у которых фазовое пространство имеет наиболее простую топологическую структуру: единственная особая точка (устойчивый фокус или узел) расположена в начале координат, иных особых траекторий нет, и область устойчивости (притяжения) особой точки охватывает все пространство. Именно такую топологическую структуру имеет фазовое пространство устойчивой линейной системы. В этом смысле задача сводится к отысканию условий, при выполнении которых нелинейная система топологически эквивалентна (условно мы будем говорить просто «эквивалентна») устойчивой линейной системе.
Вторая задача связана с определением периодических решений систем дифференциальных уравнений. Знание возможных периодических решений играет разную роль для систем, имеющих второй порядок, и для систем, имеющих более высокий порядок. В любом случае знание периодических решений важно само по себе: если периодическое решение устойчиво, то оно определяет незатухающие колебания, возможные в системе. Но для систем второго порядка знание периодических решений (то есть предельных циклов) и возможных равновесий (особых точек) позволяет часто восстановить фазовый портрет системы, а условия появления периодических решений позволяют восстановить ее бифуркационные границы. Иначе обстоит дело для систем, порядок которых выше двух. У таких систем знание особых точек и предельных циклов недостаточно для восстановления фазового портрета — решающую роль играют сепаратрисные поверхности.
Когда говорят об устойчивости линейных систем, имеют в виду просто сходимость к положению равновесия процесса, вызванного произвольным начальным отклонением или возмущением. Используя геометрический образ фазового пространства, можно уточнить теперь понятие устойчивости нелинейной системы.
Равновесие называется устойчивым «в малом», если ему соответствует в фазовом пространстве системы устойчивая особая точка, то есть можно указать в фазовом пространстве область, из любой точки которой фазовые траектории ведут к точке равновесия.
Таким образом, утверждение, что регулируемый режим устойчив «в малом», означает лишь наличие точки — аттрактора, но не определяет как-либо границ её области притяжения. Пусть фазовый портрет системы построен и выделена область притяжения особой точки (область устойчивости). Назовем ее областью А.
Укажем теперь на фазовой плоскости область, в пределах которой могут оказаться значения координат х1 , х2 рассматриваемой системы автоматического регулирования в соответствии с условиями ее технической эксплуатации, то есть область рабочих диапазонов х 1 и х2 . Назовем ее областью В.
Если все точки области В принадлежат области А, то регулируемый режим называется устойчивым «в большом».
На рис.6 показан пример фазового портрета, в котором область устойчивости ограничена неустойчивым предельным циклом. Две области значений х1 , х2 при любых физически возможных возмущениях системы заданы в виде прямоугольников. В случае рис.6, а система устойчива «в большом», а в случае рис.6, б она устойчива «в малом», но не устойчива «в большом», так как при некоторых значениях х1 , и х2 , возможных в системе, регулируемый режим не восстанавливается.
Если область притяжения особой точки (область устойчивости) не ограничена и охватывает все фазовое пространство, то есть система устойчива после любых начальных отклонений, то она называется устойчивой «в целом». Если линейная система устойчива, то она всегда устойчива «в целом». Нелинейные системы, имеющие единственное положение равновесия, устойчивое «в целом», составляют класс нелинейных систем, в смысле топологической структуры фазового пространства эквивалентных линейным.
Разработано множество аналитических методов исследования нелинейных систем. Однако как было отмечено выше, все они включают в большинстве случаев существенные упрощающие предположения. Между тем, использование современных быстродействующих компьютеров позволяет за сравнительно короткое время строить реальные фазовые портреты систем без упрощающих предположений. При этом путём прямых компьютерных экспериментов удаётся в большинстве случаев выявить бифуркационные границы и установить комбинации параметров системы, обеспечивающие её устойчивость в целом.
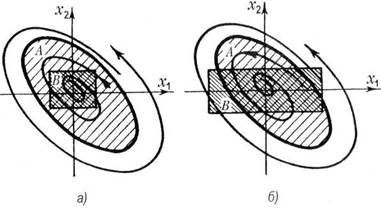
Рис.6. Области устойчивости системы в фазовой плоскости: а — «в большом» и б — «в малом»
Контрольные вопросы
1.Что такое неустойчивая система?
2.В чем особенность фазовых портретов нелинейных систем?
3.Что называется предельным циклом нелинейной системы?