Реферат: Оптимизация режимов движения судов с использованием MATLAB 5.0
Разложить имеющийся периодический сигнал в ряд Фурье.
Исходные данные.
Исходным является сигнал представлен на рисунке.
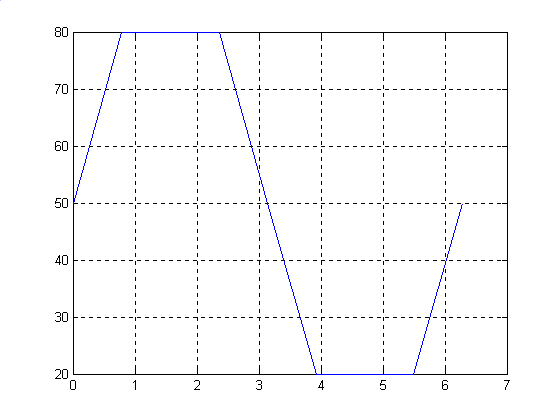
Программа.
U1=[];U2=[];U3=[];
U4=[];U5=[];U6=[];
for Wt=0:0.002*pi:2*pi;
Um=50;a=pi/2;
uu=Um+(4*Um/(a*pi))*(sin(a)*sin(Wt)+(1/9)*sin(3*a)*sin(3*Wt)+(1/25)*sin(5*a)*sin(5*Wt)+(1/49)*sin(7*a)*sin(7*Wt));
U6=[U6 uu];
if 0<=Wt & Wt
u=50+(50/(pi/2))*Wt;
U1=[U1 u];
elseif (pi/2)<=Wt & Wt<(3/2)*pi;
u=50+50-(50/(pi/2))*(Wt-pi/2);
U2=[U2 u];
else
u=50-50+(50/(pi/2))*(Wt-(3/2)*pi);
U3=[U3 u];
end
U=[U1 U2 U3];
U6;
end
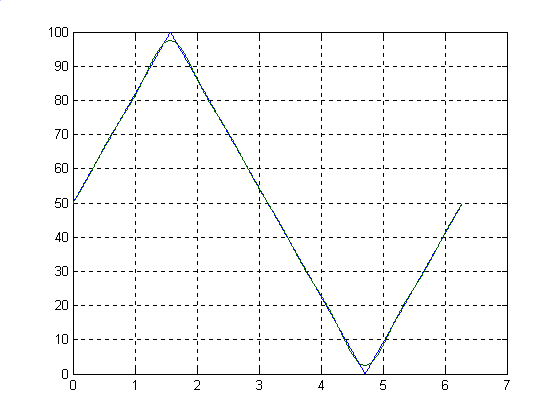
Wt=0:0.002*pi:2*pi;
plot(Wt,U,Wt,U6),grid
Результат.
Вывод.