Реферат: Основы построения систем. Способы передачи и анализ телемеханических сигналов
Соотношения (2.1) и (2.2) являются парой преобразований Фурье, причем первое из них выражает так называемую спектральную плотность сигнала (частотный спектр).
Любой сигнал конечной длительности ![]() или периодический сигнал
или периодический сигнал ![]() могут быть представлены совокупностью периодических (гармонических) составляющих (рис. 13) в соответствии с разложением в ряд Фурье.
могут быть представлены совокупностью периодических (гармонических) составляющих (рис. 13) в соответствии с разложением в ряд Фурье.
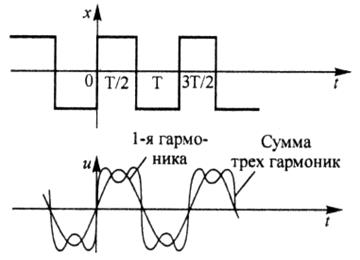 |
Рис. 13. Представление сигналов гармоническими составляющими
Коэффициенты разложения определяются функционалами:
где: ![]()
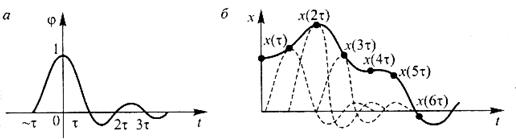
Другим широко используемым способом представления любого сигнала является его представление временным рядом, т.е. конечным набором функций, описывающих интерполирующий импульс ![]() (рис. 14, а) при разных его смещениях по оси времени (рис. 14, б). Обычно такой импульс удовлетворяет условиям:
(рис. 14, а) при разных его смещениях по оси времени (рис. 14, б). Обычно такой импульс удовлетворяет условиям:
![]()
![]()
 |
???. 14. ????????????? ???????? ????????? ?????
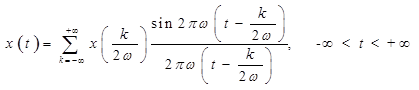
Сигналы с ограниченной частотой изменения![]() представляют дискретным набором отсчетов через равностоящие промежутки времени (рис. 15) в соответствии с теоремой Котельникова (теорема отсчетов), т.е. для любого
представляют дискретным набором отсчетов через равностоящие промежутки времени (рис. 15) в соответствии с теоремой Котельникова (теорема отсчетов), т.е. для любого
![]()
Кроме указанных способов представления произвольных сигналов существует множество других, например разложения по полиномам Лежандра, Чебышева, Лагерра, функциямБесселя, Хаара и др.
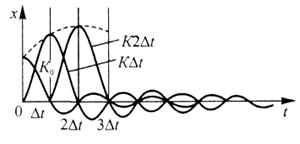
Рис. 15 Представление сигналов дискретными отсчетами
Таким образом, для описания любых детерминированных во времени сигналов существуют различные методы. Однако в реальных системах часто приходится иметь дело со случайными сигналами, т.е. с такими функциями времени, значения которых лежат в определенном диапазоне и появление любой из них имеет определенную вероятность (стохастический процесс) ![]() где
где ![]() рассматривается как вектор в гильбертовом пространстве, образуемом точками по параметру t.
рассматривается как вектор в гильбертовом пространстве, образуемом точками по параметру t.
В таких системах стремятся определить не конкретное значение сигнала (отдельная реализация), а вычислить статистические средние значения по отношению к случайным переменным (математическое ожидание). Тогда случайный процесс во времени характеризуется детерминированной во времени функцией от различных ожиданий, а не формой конкретных сигналов. В этом состоит принципиальное различие в описаниях детерминированных и случайных сигналов.
Для сравнительной оценки сигналов одного множества по каким-либо свойствам каждой паре элементов множества ставится в соответствие действительное положительное число, называемое расстоянием между элементами .
Расстояния во множестве, представляющем пространство сигналов, определяют по условному правилу, называемому метрикой данного пространства . Метрика должна удовлетворять следующим условиям:
![]() т.е. расстояние неотрицательно;
т.е. расстояние неотрицательно;
![]() т.е. расстояние от х до у равно расстоянию от у до х (симметрия);
т.е. расстояние от х до у равно расстоянию от у до х (симметрия);
![]() т.е. длина одной стороны треугольника векторов не может быть больше суммы двух других.
т.е. длина одной стороны треугольника векторов не может быть больше суммы двух других.
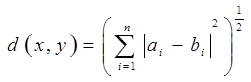
Для одного и того же множества элементов по разным метрикам могут быть образованы разные метрические пространства. Например, если принять ![]() и
и![]() то расстояние в трехмерном пространстве (Евклидова метрика)
то расстояние в трехмерном пространстве (Евклидова метрика)
Из этого же множества элементов может быть образовано пространство, определяемое по метрике Хэмминга, т.е.
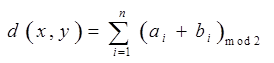
В этом случае расстояние между любой парой слов определяется числом несовпадающих символов (суммирование по модулю 2) по всем разрядам. Эта метрика широко применяется для сравнения кодов по возможностям обнаружения и исправления ошибок.
Кодирование . Сообщения, подлежащие передаче по каналу связи, должны быть представлены в форме, наиболее удобной для передачи по данному каналу. Таким образом, подразумевается преобразование одного исходного пространства сигналов в эквивалентное ему. Подобное преобразование проходит в два этапа. Первоначально из избыточного множества сигналов![]() следует выделить подмножество
следует выделить подмножество ![]() , содержащее М нужных сигналов. Затем их необходимо поставить в однозначное соответствие с исходными сигналами. Первый этап может быть осуществлен
, содержащее М нужных сигналов. Затем их необходимо поставить в однозначное соответствие с исходными сигналами. Первый этап может быть осуществлен![]() различными способами, а второй — М! Таким образом, общее число возможных правил кодирования
различными способами, а второй — М! Таким образом, общее число возможных правил кодирования ![]() .
.