Реферат: Передаточное отношение многоступенчатых передач
по направлению винтовой линии – на правую и левую резьбу. Винты с правой резьбой ввинчивают по часовой и вывинчивают против часовой стрелки. Правое направление имеет абсолютное большинство резьб.
По назначению резьбы делят на крепежные, крепежно-уплотнительные и ходовые. Крепежная резьба должна обладать достаточной прочностью и значительным трением, предохраняющим соединяемые детали от самоотвинчивания. Крепежно-уплотнительные резьбы помимо перечисленных свойств должны обеспечить повышенную плотность соединения. Ходовые резьбы должны быть с малым трением, чтобы уменьшить износ и повысить КПД подвижного резьбового соединения.
Метрическая резьба (см. рис. 5, а) получила наибольшее распространение в резьбовых крепежных соединениях. Имеет профиль равностороннего треугольника с углом профиля a = 60°. Вершины и впадины резьбы для уменьшения концентрации напряжений притуплены по прямой или по дуге. Радиальный зазор в резьбе делает ее негерметичной. Метрические резьбы делятся на резьбы с крупным (основным) и мелким шагом. Резьбы с мелким шагом меньше ослабляют деталь, обладают более высокой динамической прочностью и характеризуются из-за малого угла подъема g винтовой линии повышенным самоторможением. Как крепежные, резьбы с мелким шагом применяются в соединениях, подверженных переменным воздействиям и в тонкостенных деталях. Метрическая резьба обеспечивает лучшее направление винта или гайки в винтовых механизмах из-за малого радиального смещения по сравнению с трапецеидальной резьбой. В механизмах винт-гайка с шагами резьбы до 1 мм применяют только метрические резьбы из-за сложности изготовления с такими шагами ходовых резьб трапецеидального и прямоугольного профилей.
Дюймовая резьба используется для крепежных деталей импортного оборудования, вышедших из строя. Она имеет угол профиля a = 55° и плоскосрезанные вершины треугольного профиля. Параметры резьбы дают в дюймах [один дюйм 1² = 25,4 мм]. Применение дюймовых резьб (кроме трубных) для новых изделий запрещается.
|
|
|
|


|
|

Рис. 5
|
|
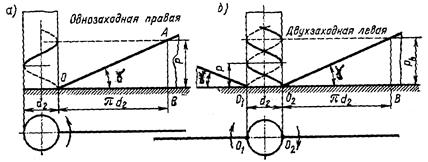
Рис. 6
Трубная резьба представляет собой мелкую дюймовую резьбу, она обеспечивает беззазорность и плотность резьбового соединения за счет скругления вершин и впадин резьбы (см. рис. 5, б). За номинальный диаметр трубной резьбы принимают внутренний диаметр трубы, а наружный диаметр трубной резьбы больше номинального на величину удвоенной толщины стенки трубы. Например, резьба труб ½ ² используется для труб с внутренним диаметром ½ ², наружный диаметр ее равен 20,96 мм. Используется трубная резьба в трубопроводах и для тонкостенных деталей.
Трапецеидальная резьба (см. рис. 5, в) – основная резьба в механизмах винт-гайка. Ее профиль – равнобокая трапеция с углом a = 30°. Резьба имеет меньшие по сравнению с резьбой треугольного профиля потери на трение, больший КПД, обеспечивает высокую точность осевого перемещения ведомого звена. Широко применяется для реверсивных передач винт-гайка.
Упорная резьба (см. рис. 5, г) имеет профиль неравнобокой трапеции с углом a = 30°. Рабочая сторона профиля имеет угол наклона 3°, КПД этой резьбы выше, чем КПД трапецеидальной резьбы. Рекомендуется применять эту резьбу в механизмах винт-гайка при значительных односторонних осевых нагрузках.
Прямоугольная резьба (см. рис. 5, д) с профилем в форме квадрата имеет самый высокий КПД, так как угол профиля резьбы a = 0. Резьба обладает пониженной прочностью. При износе образуются осевые зазоры, которые трудно устранить. Резьба применяется в малонагруженных передачах винт-гайка (перемещение головок записи и считывания информации в дисководах).
Круглая резьба (см. рис. 5, е) имеет угол профиля a = 30°. Профиль резьбы состоит из дуг, сопряженных короткими прямыми линиями. Резьба не стандартизирована. Характеризуется высокой динамической прочностью, имеет ограниченное применение.
В механизмах винт-гайка применяют трапецеидальные, метрические, прямоугольные и упорные резьбы. Наибольшее применение получили трапецеидальные и метрические резьбы. Трапецеидальную резьбу рекомендуют применять с шагом р > 1 мм, метрическую в механизмах с мелкими шагами (р £ 1,0).
КПД винтовых механизмов рассчитывают по формуле
h = tgg / tg(g + rт ), (4)
где g – угол подъема винтовой линии; rт – приведенный угол трения.
Для резьбы приведенный угол трения
rт = arctgf¢ = arctg[f / cos(a/2)], (5)
где f¢ – приведенный коэффициент трения скольжения; f – коэффициент трения скольжения между материалами винта и гайки; a – угол профиля резьбы.
Для прямоугольной резьбы a = 0 и f¢ = f, для трапецеидальной резьбы a = 30° и f¢ = 1,04 f; для метрической резьбы a = 60° и f¢ = 1,15 f.
Наибольшим КПД обладает прямоугольная, а наименьшим – метрическая резьба.
Кинематика винтовых механизмов
В технических системах более всего распространены винтовые механизмы, выполненные по схеме, представленной на рис. 6, б. Зависимость линейного перемещения ℓ2 ведомой гайки от угла поворота j1 винта (функция положения) имеет вид
 , (6)
, (6)
где  – передаточная функция, или аналог скорости передачи винт-гайка.
– передаточная функция, или аналог скорости передачи винт-гайка.
Линейная скорость ведомой гайки
v2 = dl2 /dt = ![]() , (6)
, (6)
где w1 = dj1 /dt – угловая скорость винта.
Для снижения скорости линейного перемещения гайки при заданной угловой скорости винта w1 уменьшают шаг резьбы р и число ее заходов z принимают равным 1. Скорость перемещения гайки v2 можно уменьшить за счет снижения угловой скорости винта w1 с помощью червячной или многоступенчатой зубчатой передачи (редуктора). Эти редукторы устанавливают между двигателем и передачей винт – гайка. Тогда w1 = wд / iд1 , где iд1 – передаточное отношение зубчатого редуктора, wд – скорость вращения двигателя.
Механизм с дифференциальным винтом (рис. 6, д) имеет две винтовые пары с разными параметрами резьбы. В паре со стойкой 3 винт имеет резьбу с шагом р1 и числом заходов z1 , а в винтовой паре с ведомой гайкой 2 – резьбу с шагом р2 и числом заходов z2 . Аналог скорости поступательного перемещения в соответствующих винтовых парах будет соответственно равен  и
и  . Функция положения, т.е. зависимость линейного перемещения гайки 2 от угла поворота винта, равна
. Функция положения, т.е. зависимость линейного перемещения гайки 2 от угла поворота винта, равна
 , (7)
, (7)
где знак минус относится к механизмам с винтом, имеющим резьбы одного направления винтовой линии, а знак плюс – к механизмам с винтом, имеющим резьбы в парах со стойкой 3 и гайкой 2 с разным направлением винтовой линии, например, правую и левую резьбы.
Длина нарезанной части винта Lb определяется по формуле
Lb =ℓmax +ℓr +Dℓ, (8)
где ℓmax – максимальное перемещение винта или гайки; ℓr – длина резьбы гайки; Dℓ – запас резьбы (2 … 3 витка).
Для обеспечения достаточной прочности и жесткости диаметр винта d выбирают из соотношения d ³ 0,05 Lb.
Механизмы с гибкими звеньями
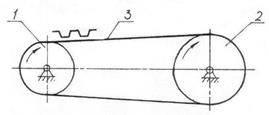
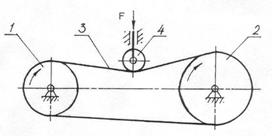
Применяют для передачи вращательного движения между валами при больших межосевых расстояниях и для преобразования вращательного движения в поступательное и наоборот. Ведущее и ведомое жесткие звенья таких механизмов не имеют между собой непосредственного контакта, а передача движения осуществляется посредством гибкого звена, которое может быть как замкнутым, так и разомкнутым. По характеру соединения гибкого звена с ведущим и ведомым звеньями рассматриваемые механизмы подразделяют на передачи трением, передачи зацепления и передачи с жестким креплением гибкого звена к другим звеньям. В передачах трением в качестве гибкого звена используют плоские и клиновидные ремни, пассики, круглые шнуры и ремни, нити (рис. 9, а). Передача состоит из ведущего 1 и ведомого 2 шкивов, а также замкнутого звена 3, надетого на шкивы с натяжением. Таким передачам присущи все достоинства и недостатки фрикционных механизмов непосредственного касания. Необходимым условием нормальной работы передачи трением является натяжение гибкого звена, что достигается обычно при помощи натяжного ролика 4 (см. рис. 9 ). В передачах зацепления гибким звеном служит зубчатый ремень, перфорированная лента, цепь. Преимущества этих передач (см. рис. 9, б) перед передачами трением соответствуют преимуществам зубчатых передач по отношению к фрикционным.
а б
Рис. 9
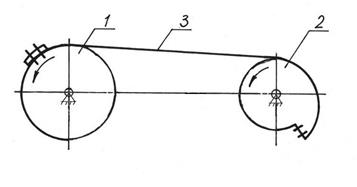
В передачах с жестким креплением разомкнутого гибкого звена к ведущему 1 и ведомому 2 звеньям (рис. 10) исключается возможность его проскальзывания, чем обеспечивается точность передачи. Недостатком таких передач является ограничение вращения ведущего и ведомого звеньев в одном направлении углом, меньшим 2π.
|
ЛИТЕРАТУРА
1 | Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов приборов и вычислительных систем: Учебное пособие. М.: – Высш. шк., 2001. – 480 с. | 2001 |
| 2 | Сурин В.М. Техническая механика: Учебное пособие. – Мн.: БГУИР, 2004. – 292 с. | 2004 |
3 |
К-во Просмотров: 201
Бесплатно скачать Реферат: Передаточное отношение многоступенчатых передач
|