Реферат: Помехи и их классификация. Задача обнаружения и методика ее решения
R = C11 P(A1) P(A1*/A1) + C01 P(A1) P(A0*/A1) + C10 P(A0) P(A1*/A0) + C00 P(A0) P(A0*/A0)
Условные вероятности, представленные в данном выражении, носят в статистической теории обнаружения специальные названия и имеют специальные обозначения:
D = P(A1*/A1) - условная вероятность правильного обнаружения, т.е. вероятность принять решение о наличии сигнала, когда сигнал есть;
D^ = P(A0*/A1) - условная вероятность пропуска сигнала, т.е. вероятность принять решение об отсутствии сигнала, когда сигнал есть;
F = P(A1*/A0) - условная вероятность ложной тревоги, т.е. вероятность л принять решение о наличии сигнала, когда сигнала нет;
F^ = P(A0*/A0) - условная вероятность правильного необнаружения, т.е. вероятность принять решение об отсутствии сигнала, когда сигнала нет.
Поскольку соответствующие одному и тому же условию А1 или А0 решения А1* и А0* взаимно исключающие, то
D + D^ = 1, F + F^ = 1.
Отметим также, что наличие и отсутствие сигнала составляют полную группу событий, так что априорные вероятности этих событий удовлетворяют условию
P(A1) + P(A0) = 1
С учетом введённых обозначений выражение среднего риска можно представить в виде
 где
где

Полученное выражение свидетельствует о том, что минимуму среднего риска соответствует максимум взвешенной разности условных вероятностей правильного обнаружения и ложной тревоги
minR → max(D – l0F),
причём весовой множитель l0 зависит от априорных вероятностей наличия и отсутствия сигнала и соотношения цен (плат) за правильные и ошибочные решения.
Отношение правдоподобия. Правило решения.
Рассмотрим постановку задачи оптимального обнаружения реальных сигналов, которые являются функциями времени. Напомним, что пространственные и поляризационные характеристики сигналов и помех пока не рассматриваются, всё внимание сосредоточено только на их временных характеристиках.
Принятый сигнал f(t) может состоять из сигнала m(t) и помехе n(t)
f(t) = m(t) + n(t) → условие А1,
либо сводиться только к помехе
f(t) = n(t) → условие А0.
Задача заключается в том, чтобы указать правило решения, которое бы "наилучшим" образом позволило на основании принятого сигнала f(t) решить, какое из двух условий (А1 или А0) верно.
Пусть принятый сигнал f(t) характеризуется плотностью вероятности p1(f) при условии А1 и плотностью вероятности p0(f) при условии A0. Если вместо непрерывной функции f(t) рассматривать L дискретных значений £1, f2, …, fL то функции p1(f) и p0(f) являются 2L - мерными распределениями вероятностей, что более подробно следует записать так:
Выбор правила решения заключается в разбиении 2L - мерного пространства f1, f1*, …, fL, fL* на такие две области Г1 и Г0, когда при попадании точки в область Г1 выносится решение о верности условия А1, а при попадании в область Г0 - решение о верности условия А0. Подобное разбиение схематически изображено на Рис.6 для случая 2L = 2.

Рис.6. Схематическое разбиение двумерного пространства решения на области Г1 и Г0.
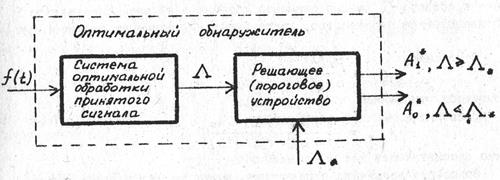
Рис.7. Структура оптимального обнаружителя.