Реферат: Порядок моделирования входного сигнала
Необходимо промоделировать сигнал, представляющий собой
произведение двух функций: X=X4*X16; X(t)=X4*X16
Сигнал X4 задан функцией вида:
![]() (1.5)
(1.5)
где A = 40, T=4ms, ![]()
Для перехода к циклической частота воспользуемся формулой:
![]() ;
; ![]() ; (1.6)
; (1.6)
![]() рад/с
рад/с
Сигнал X16 задан функцией вида:
![]() (1.7)
(1.7)
где A = 75, T=17ms, ![]()
Для перехода к циклической частоте воспользуемся формулой (1.6):
![]() ;
;
![]() рад/с
рад/с
После преобразований составим структурную схему в Simulink для моделирования заданных сигналов, а так же для моделирования результирующего сигнала. Она приведена на рисунке 1.1.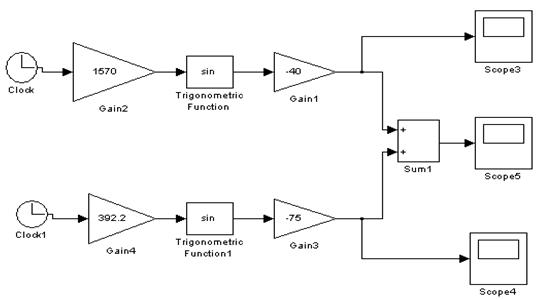
Рисунок 1.1– Структурная схема для моделирования сигнала 1, 2 и результирующего сигнала
|
|
|
Объект Б задан дифференциальным уравнением:
2.88y/// +5.76 y// +5.76 y/ +2.88y = 9.23x(2.1)
Преобразуем дифференциальное уравнение (2.1) к машинному виду
2.88p3 y(p)+5.76 p2 y(p) +5.76 py(p) +2.88y(p) = 9.23x(p) (2.2)
y(p)(2.88p3 +5.76 p2 +5.76 p +2.88) = 9.23x(p) (2.3)
Так как правая часть уравнения (2.1) не содержит производной от входного сигнала, решим его общим методом. Запишем его в форме Коши:
 ; (2.4)
; (2.4)
 (2.5)
(2.5)
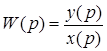
Полученное уравнение позволяет осуществить построение двух структурных схем для моделирования объекта, заданного уравнением (2.1). Структурные схемы приведены на рисунке 2.1 и 2.2
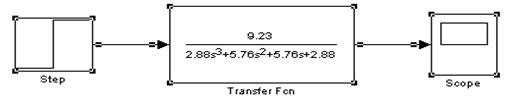
Рисунок 2.1 – Структурная схема модели объекта Б (с использованием блока TransferFcn)
Рисунок 2.2 – Структурная схема модели объекта Б (с использованием блоков Integrator)