Реферат: Радиоуправление летательными аппаратами
Содержание
1)Введение……………………………………………....2
2)Общая характеристика систем управления……........3
3) Общая характеристика радиоуправления летательными аппаратами……………………….8
4) Краткая характеристика способов управления
полетом…....................................................................12
Введение
Работы по использованию средств радиотехники для управления на расстоянии, т.е. работы по радиоуправлению, начались еще до первой мировой войны. Однако до второй мировой войны радиоуправление практического применения, по существу, не получило. Положение резко изменилось, начиная с 40-х годов. Особенно большие успехи были достигнуты в области управления беспилотными летательными аппаратами. Причиной этого были два следующих обстоятельства:
1)Успешное использование созданного к этому времени реактивного оружия во многих случаях оказалось возможным только на базе широкого применения радиоуправления.
2)Создание к 40-м годам достаточно эффективных средств визирования (радиолокаторов) управляемых объектов и целей.
Следует отметить, что разработка беспилотных летательных аппаратов несколько опередила необходимых для управления средств радиолокации. Поэтому первые управляемые по радио беспилотные летательные аппараты, или наводились на неподвижную цель с неподвижного пункта управления, или управлялись с помощью оптических средств.
Применение радиоуправления связанно в общем случае с наличием радиотехнических средств визирования для определения параметров движения целей и снарядов, которые часто дополняются радиотехническими средствами передачи команд с пункта управления на снаряд и иногда различных данных со снаряда на пункт управления. Управление по радио может быть нарушено организацией искусственных радиопомех.
Общая характеристика систем управления
Радиоуправлением называется управление с помощью радиосредств любыми процессами и объектами. По количеству решаемых задач управление может быть одноцелевым или многоцелевым, т. е. обеспечивающим решение не одной, а двух или более задач. Например, система управления совокупностью искусственных спутников Земли (ИСЗ) может проектироваться одновременно для следующих двух целей:
1. Обеспечение движения совокупности ИСЗ по заданным траекториям (необходимым, например, для осуществления глобальной радиосвязи).
2. Осуществление различных переключений аппаратуры на борту ИСЗ, необходимых для выполнения этими ИСЗ определенных задач.
По количеству одновременно управляемых объектов управление может быть однообъектным или многообъектным. Упомянутая выше система управления совокупностью ИСЗ является многообъектной, так как должна осуществлять управление несколькими ИСЗ.
По количеству пунктов управления (командных пунктов), из которых может осуществляться управление данным объектом, это управление может быть однопунктным или многопунктным. Примером многопунктного (двухпунктного) управления является управление космическим кораблем, которое может осуществляться как космонавтом (т. е. с бортового пункта управления), так и с наземного пункта управления.
Следует также различать обычное (одноступенчатое) и иерархическое (многоступенчатое) управление. В иерархических (многоступенчатых) системах управления команды управления могут формироваться не одним, а несколькими людьми или управляющими устройствами и притом в иерархическом (по отношению к управляемому объекту) порядке. Примером иерархического (многоступенчатого) управления является управление движением пассажирского самолета. На первой (низшей) ступени управление движением самолета осуществляется пилотом, на второй (более высокой) ступени — командиром экипажа, на третьей ступени — диспетчером наземного пункта управления и т. п. Очевидно, иерархическое управление может быть как многопунктным, так и однопунктным. Например, если система управления межпланетным космическим кораблем будет предусматривать возможность управления этим кораблем только с борта этого корабля, но двумя лицами — космонавтом-пилотом и космонавтом-командиром корабля, то управление таким кораблем будет однопунктным, но иерархическим (двухступенчатым). Очевидно также, что многопунктное управление может быть как иерархическим, так и обычным. Например, если при старте автоматической межпланетной станции управление ее движением будет производиться из одного командного пункта, а при посадке — из другого, то такое управление будет многопунктным, но не иерархическим.
Общая функциональная схема одноцелевой системы управления
содержащая всего один командный пункт с обычным (неиерархическим) управлением приведена на рис. 1.1 и состоит из информационно-измерительного устройства (ИИУ), управляющего устройства (УУ), командной линии (КЛ) и управляемого объекта. Информационно-измерительное устройство
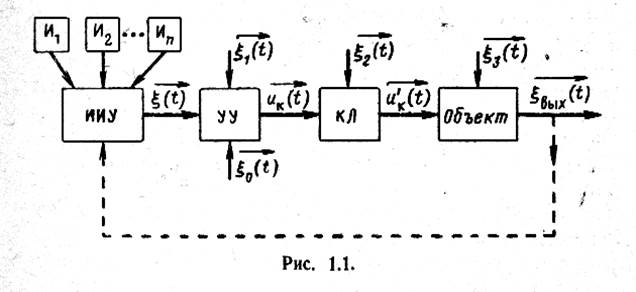
извлекает (собирает) информацию из внешних источников И1, И2 , . . ., Иn и
информацию о состоянии управляемого объекта (при наличии канала
обратной связи). Управляющее устройство вырабатывает команды управления
![]()
uk (t) на основе поступающей на его входы текущей (рабочей) информации
![]()
![]() ξ(t) и начальной (априорной) информации ξ0(t) . Далее команды передаются по командной линии на управляемый объект. Вследствие возникающих при
ξ(t) и начальной (априорной) информации ξ0(t) . Далее команды передаются по командной линии на управляемый объект. Вследствие возникающих при
этом искажений, команды u’ k (t) , поступающие на объект, могут несколько
--> ЧИТАТЬ ПОЛНОСТЬЮ <--