Реферат: Радиоуправление летательными аппаратами
Из приведенного выше краткого обзора следует, что характер задач радиоуправления в большой мере зависит от вида управляемого аппарата и его назначения. Так, например, при управлении аппаратами невоенного назначения отпадают задачи радиопротиводействия и подрыва боевой части; при управлении снарядами отсутствует задача посадки летательного аппарата и т. п. Однако для большинства управляемых летательных аппаратов характерно наличие управления их движением. Это управление в общем случае заключается в управлении перемещениями центра масс аппарата и его поворотами вокруг центра масс, т. е. в управлении полетом и ориентацией. При этом управление ориентацией аппарата может требоваться как для обеспечения надлежащего управления его полетом, так и иметь самостоятельное значение (например, при необходимости обеспечить определенное положение корпуса летательного аппарата относительно Земли).
Радиоуправление движением летательных аппаратов и морских судов часто называют также радионавигацией.
Термин навигация возник впервые применительно к морским судам и под радионавигацией понималось вначале вождение с помощью радиосредств морских судов. С появлением самолетов термины «навигация» и «радионавигация» были распространены и на вождение самолетов. В связи с появлением космических кораблей эти термины были распространены и на вождение космических кораблей. Поэтому в настоящее время под радионавигацией понимают обычно вождение с помощью радиосредств морских, воздушных и космических кораблей. Для всех этих управляемых объектов характерно наличие на борту объекта человека (пилота), который может принимать непосредственное участие в управлении.
Термин радиоуправление, наоборот, начал впервые широко использоваться лишь применительно к управлению по радио беспилотными объектами — снарядами. В дальнейшем, в соответствии с развитием техники управления и кибернетики, существенно расширившей понятие «управление», термин радиоуправление начал применяться не только к беспилотным, но и к пилотируемым аппаратам.
Следует отметить, что в последние годы развитие техники управления движением летательных аппаратов привело к тому, что оба термина — радиоуправление и радионавигация в значительной мере утратили свой четкий смысл. Действительно, еще сравнительно недавно все системы управления и навигации можно было достаточно четко разделить на два класса — такие, в которых радиосредства не применяются для управления, и такие, в которых эти средства применяются. При этом, как правило, в тех системах управления, в которых радиосредства применялись, они играли доминирующую роль.
Для повышения качества управления применяется комбинация (комплексирование) радиосредств с другими, например инерциальными приборами управления. При этом классы систем, в которых радиосредства совершенно не применяются или, наоборот, являются доминирующими, постепенно сужаются. Особенно это относится к управлению пилотируемыми аппаратами, т. е. к навигации. Поэтому в настоящее время более правильно говорить не о радионавигации, а просто о навигации и под радионавигационными приборами (средствами) понимать не приборы для радионавигации, а радиоприборы для навигации. Соответственно в общем случае следует говорить не о средствах радиоуправления, а о радиосредствах (и других средствах) управления.
Для управления ориентацией летательных аппаратов радиосредства применяются в значительно меньшей мере, чем для управления их полетом.
Краткая характеристика способов управления полетом
Принципы рулевого управления
Управление полетом аппарата осуществляется изменением его
скорости V т. е. сообщением аппарату ускорения W (рис. 1.4).
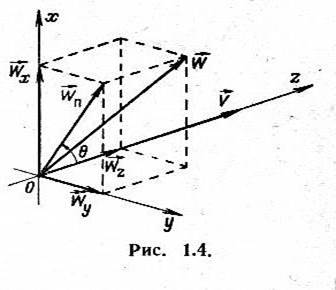
При этом изменение модуля скорости V осуществляется созданием
касательного ускорения Wz , а изменение направления вектора скорости
созданием поперечного ускорения W п . Поперечное ускорение в декартовой
системе координат определяется своими составляющими Wx и Wy , а в полярной
системе координат модулем W п и полярным углом θ . Управление величиной и
направлением ускорения W осуществляется при помощи рулевых органов. Так
![]()
![]() как
как
W = F / m ,
![]() где F — результирующая сила, приложенная к аппарату, имеющему массу m , то
где F — результирующая сила, приложенная к аппарату, имеющему массу m , то
управление ускорением W достигается изменением результирующей силы F .
Изменение силы F осуществляется путем изменения силы тяги Т (создаваемой реактивным или каким-либо иным двигателем) и (или) результирующей
аэродинамической силы R (создаваемой воздушным потоком, обтекающим
![]() аппарат). Рулевые органы, управляющие силой R , называются воздушными рулями и позволяют получить эффективное управление лишь при полете с достаточной скоростью в достаточно плотных слоях атмосферы.
аппарат). Рулевые органы, управляющие силой R , называются воздушными рулями и позволяют получить эффективное управление лишь при полете с достаточной скоростью в достаточно плотных слоях атмосферы.
В некоторых случаях управление величиной скорости аппарата на основном участке его траектории не требуется и осуществляется управление лишь направлением полета. При этом достаточно иметь рулевые органы,
![]() управляющие лишь поперечным ускорением W п .
управляющие лишь поперечным ускорением W п .
Рулевое управление может быть декартовым, полярным или смешанным. При декартовом управлении рули высоты, поворота и "разгона — торможения"
управляют соответственно составляющими Wx , Wy и Wz полного ускорения W в декартовой системе координат (рис. 1.4). При полярном рулевом управлении один из рулевых органов управляет модулем ускорения W (в некоторых системах этот рулевой орган может, кроме того, изменять направление вектора