Реферат: Расчет электрического привода механизма подъема башенного крана
При выборе аппаратуры управления необходимо учитывать возможные повышения температуры окружающей среды по сравнению с расчётной. Для контактов аппаратов можно рекомендовать увеличить номинальный ток на 20% при повышении температуры на каждые 100 С. Однако для контакторов и пускателей температура воздуха влияет на работу не только контакторов, но и катушек электромагнитов. Поэтому можно рекомендовать переход на аппараты тропического исполнения или снижать продолжительность включения так же на 20% при превышении температуры на каждые 100 С.
18. Вычерчивание схемы управления электродвигателя и описание ёё работы (подбор аппаратуры управления по каталогу).
Рис.1.
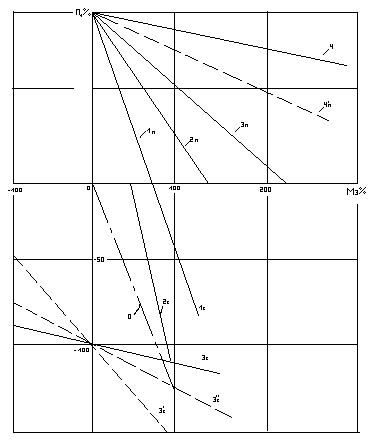
Рис.2. Механические характеристики электроприводов подъёма с торможением противовключения.
На рисунке 1 изображена схема электропривода подъёма с панелью управления ТСАЗ. схемы всех панелей управления обеспечивают автоматический разгон, реверсирование, торможение и ступенчатое регулирование скорости на реостатных характеристиках двигателя. Управление осуществляется от командоконтроллёра (кулачкового контроллёра малых размеров). В схеме электропривода обозначены: КН и КВ – контакторы реверсора, КЛ – линейный контактор, КТ – контактор тормоза, КУ1 – КУ4 – контакторы ускорения, КП – контактор противовключения. Подача питания в схему осуществляется через рубильник В1,а в цепь управления – через рубильник В2. Защита воздействует на реле РН и осуществляется: максимальная (обеспечивает автоматическое отключение двигателя при его перегрузке или возникновении в его цепи короткого замыкания) посредством реле РМ, конечная (обеспечивает автоматическое отключение электропривода при переходе механизмом крана предельно допустимых положений) – конечными включателями ВКВ и ВКН и нулевая (обеспечивает контроль машиниста за работой механизмов крана, исключая возможность самопроизвольных пусков двигателей, отключённых вследствие срабатывания защитных устройств или перерыва подачи электроэнергии) – непосредственно реле РН. Для защиты панели управления от токов, возникающих при коротких замыканиях, и значительных (50% и более) перегрузок предусмотрены также предохранители П.
Первое положение подъёма (см.рис.2) служит для выбора слабины троса и подъёма малых грузов на пониженных скоростях (характеристика 1n ). На втором положении (характеристика 2n ) производится подъём тяжёлых грузов с малой скоростью. Последующие две характеристики 3n и 4' n являются пусковыми, на которых разгон производится под контролем реле времени РУ1 и РБ (см.рис.1), причём характеристика 4' n является нефиксированной. На положениях спуска производится регулирование скорости двигателя в режимах: противовклю-
чения на первом и втором положениях (характеристики 1с и 2с), силового спуска или генера –
торного торможения в зависимости от веса груза на третьем положении (характеристика 3с), на котором все пусковые ступени резисторов выведены. Переход на характеристику 3с осуществляется по характеристикам 3' с и 3'' с под контролем реле времени. Во всех схемах панелей для механического торможения до полной остановки используют механический тормоз ТМ.
Для спуска груза на характеристиках противовключения 1с и 2с оператору необходимо нажать ВН (см.рис.1) при установке рукоятки командоконтроллёра на соответствующую позицию спуска. Управление с помощью педали является вынужденным в связи в возможностью подъёма груза вместо спуска на характеристиках противовключения. Электропривод переводится в режим противовключения не только при опускании грузов, но и при торможении с положений спуска в нулевое (при нажатии педали на первом и втором положениях) или с третьего положения спуска в нулевое, первое или второе положения (при не нажатой педали). При этом за время выдержки реле РБ времени наряду с механическим торможением обеспечивается и электрическое на характеристике, соответствующей второму положению спуска. Помимо указанного, реле РБ контролирует также правильность сборки схемы.