Реферат: Расчет настроек автоматического регулятора
второго порядка 1 0.4 s
по заданию W(s)= ------------------------------ W(s)= -------------------------------
2 2
16,1604 s + 8,04 s + 1 14.0904 s + 6.9614 s + 1
третьего порядка 1 1
с запаздыванием W(s)= ------------------------------------- W(s)= -------------------------------
по управлению 3 2 2
91.125 s + 60.75 s + 13.5 s + 1 38.1160 s + 10.6679 s + 1
Анализируя таблицу можно сделать вывод о том, что передаточные функции второго порядка практически одинаковы, а третьего порядка значительно отличаются.
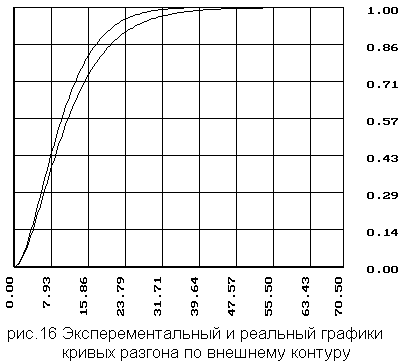
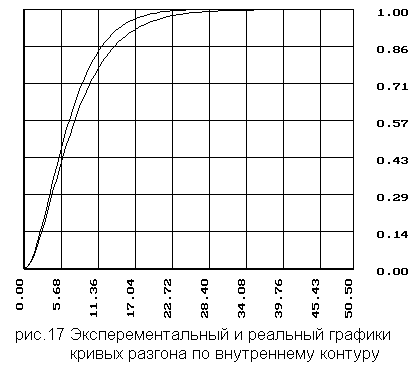
6.5 Сравнение экспериментальных и фактических кривых разгона.
Для исходных передаточных функций с помощью программы ASR, пунктов аппроксимация (создать передаточную функцию и изменить время) получим координаты кривых разгона и сравним их с экспериментальной кривой:
- по внешнему контуру
- по внутреннему контуру
- по основному каналу
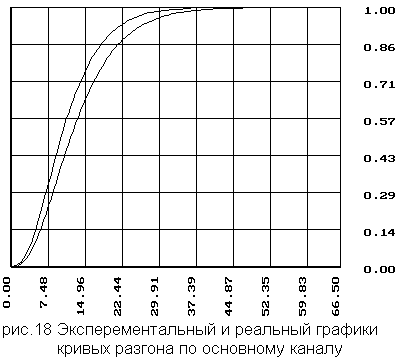
Полученные значению передаточных функций не значительно отличают от фактических, что говорит о достаточно не большой погрешности между фактическими и экспериментальными данными.
Расчет одноконтурной АСР методом Роточа.
В программе Linreg задаем параметры объекта. Выбираем в качестве регулятора ПИ- регулятор. И рассчитываем его настройки:
а) для экспериментальной передаточной функции.
В программе Linreg задаем передаточную функцию объекта второго порядка с запаздыванием. Выбираем ПИ-регулятор и определяем его настройки.
Получаем kp = 1.0796
Tu = 8.0434
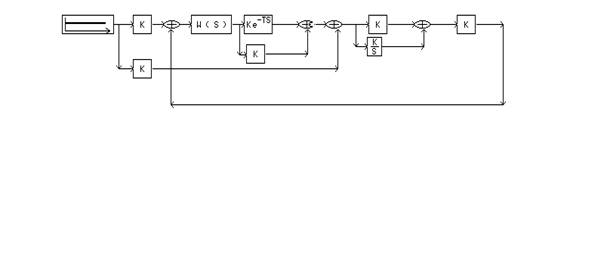
В программе SIAM пользуясь следующей схемой для одноконтурной системы
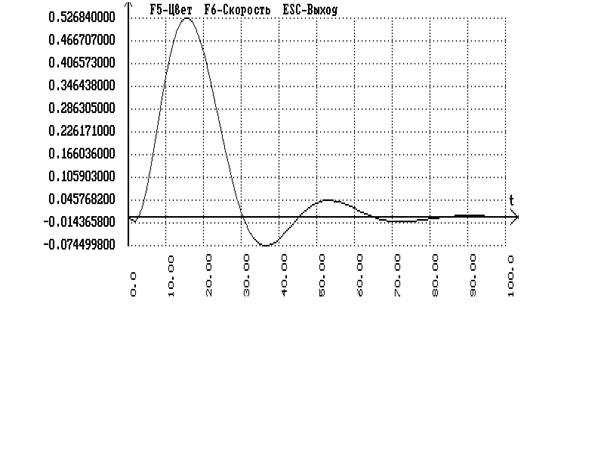
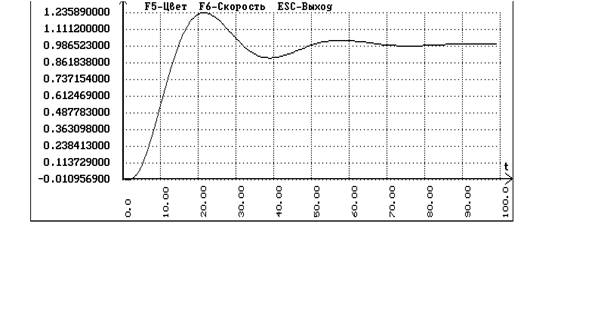
Подаем скачек на сумматор, стоящий после запаздывания и получаем график переходного процесса по заданию:
Подаем скачек на сумматор, стоящий перед объектом и получаем график переходного процесса по возмущению: