Реферат: Разработка системы управления электроприводом
R1

Рис.10. Принципиальная схема П–РС
Нам нужно получить ![]() . Для этого мы поменяем полярность тахогенератора и поставим делитель напряжения на резисторах
. Для этого мы поменяем полярность тахогенератора и поставим делитель напряжения на резисторах ![]()

П–РС реализуем на ОУ типа КР140УД17А.
Пусть ![]() , тогда
, тогда

Выбор элементов ПИ-РТВ.
Изобразим ПИ-РТВ.
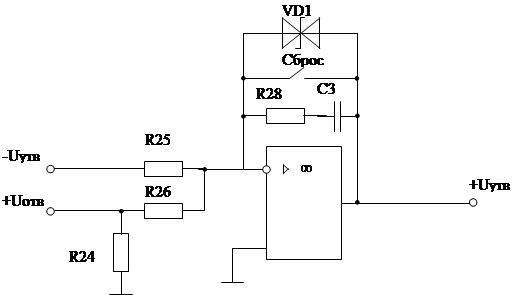 |
Рис.11. Принципиальная схема ПИ–РТВ.
В качестве датчика тока возбуждения выбираем датчик тока ДТХ–25, принцип действия которого основан на эффекте Холла.
При ![]() (номинальные значения).
(номинальные значения).
У нас ![]() . При этом мы должны получить
. При этом мы должны получить ![]() .
.
 .
.
Для ПИ-РТВ используем ОУ типа КР140УД17А. Выбираем ![]() .
.

Выбираем:
3. Выбор элементов задатчика тока возбуждения
Контур регулирования потока состоит из датчика ЭДС на сопротивлениях R18,R19,L1M1 гальванически развязывающего операционного усилителя DA1 типа ISO16p.
Сопротивление цепочки R18,R19,L1M1 выбираются исходя из того чтобы на вход микросхемы DA1 подавалось напряжение 200 мВ при максимальной скорости вращения двигателя ![]() .
.
Учитывая, что на выходе DA1 максимальное напряжение составляет ![]() В коэффициент усиления выбираем 8,тогда
В коэффициент усиления выбираем 8,тогда
![]()
Примем Uze=10В и реализуем вычитатель на ОУ КР140УД17А. Он вырабатывает на выходе сигнал рассогласования (Uze-Eя).
При R1=R3 и R2=R4 нам требуется ![]() .
.
Тогда ![]() Это значение мы имеем при максимальном рассогласовании.
Это значение мы имеем при максимальном рассогласовании.
Задаёмся ![]() , тогда
, тогда
![]()
Выбираем: