Реферат: Реализация системы технического зрения (СТЗ) на базе многокристального микропроцессора (К1804)
Введение
Микропроцессорный комплект серии К1804 включает в себя ряд модулей для построения операционных и управляющих устройств. Основой операционного устройства (ОУ) может служить микропроцессорная секция (МПС) ВС1 и ВС2. Кроме того, могут использоваться схема ускоренного переноса ВР1 и устройство управления сигналами состояния и сдвига ВР2.
Блок микропрограммного управления может быть построен на основе схем формирования адреса микрокоманды ВУ4 и ВУ1(ВУ2) , ВУ3.
Для построения ОУ выберем микропроцессорную секцию ВС2. Разрядность секции равна четырём. Следовательно, для построения 16-ти разрядного ОУ необходимы четыре секции. Микропроцессорная секция К1804 ВС2 имеет 16 РОН с двумя выходными портами считывания и фиксаторами входных данных, три внешних информационных шины: входная DA, двунаправленные DB и Y - арифметико-логическое устройство со сдвиговым устройством на выходе, многофункциональный регистр со сдвиговым устройством на входе, дешифратор 9-ти разрядного кода операции микрокоманд. Каскадное соединение четырёх секций с использованием схемы ускоренного переноса К1804ВР1 производится по стандартной схеме.
1. Разработка структуры аппаратных средств
Основой для разработки системы является, как и прежде, алгоритм функционирования. Согласно этому алгоритму определим, в каких запоминающих элементах будут храниться используемые переменные.
Распределение переменных по внутренним регистрам МП секции приведено в табл.1.
Таблица 1 ¾ Таблица соответствия
| Переменные | РОН секции ВС2 |
Шестнадцатиричный адрес ОН |
| Xц , Yц | R1 | 1 |
| Rmin | R2 | 2 |
| Xт, Yт | R3 | 3 |
| Xт’ , Yт’ | R4 | 4 |
| R | R6 | 6 |
| I | R11 | B |
| J | R12 | C |
| L | R13 | D |
| K | R14 | E |
Cтруктурная схема системы изображена на рис. 1.
Исходные данные (m, r, Xцн, Yцн) с пульта управления заносятся в регистры PM, PR, PXYЦ.
Информация в этих регистрах может быть прочитана в МПС по шине Y. Таким образом, источниками шины Y являются регистры PM, PR, PXY и выход сдвигового устройства АЛУ.
В результате выполнения алгоритма в конце каждого кадра выдаются координаты центра объекта. Для их запоминания необходимы регистр PXY. Информация в этот регистр заносится с шины Y.
МПС не имеет отдельной адресной шины, поэтому необходимо организовать запоминание адреса внешней памяти в специальном регистре.
Адрес ОЗУИ запоминается в регистре адреса РА, информация в который загружается с шины Y. Адрес ПЗУ формируется счётчиком адреса СчА, начальная загрузка которого также производится по шине Y. Формирование адреса с помощью СчА позволяет совместить по времени выполнение операций формирования адреса ОЗУИ и ПЗУ.
Таким образом приёмниками шины Y являются PXY, РА, СчА и РОНы МПС, причём возможна одновременная запись в РОН и один из оставшихся приёмников, а также отсутствие записи во все приёмники.
ОЗУИ и ПЗУ подключены к шинам DA и DB соответственно, что позволяет осуществить их одновременное чтение. В алгоритме предполагается формирование адресов отдельно по координате X и Y. Целесообразно осуществлять формирование адресов одновременно по двум координатам в одном 16-ти разрядном регистре. Для этого необходимо сформировать специальные константы. Так, для одновременного выполнения микрокоманд Y4 и Y5 необходимо сформировать константу
С1 = ![]() ; Y8, Y9 ¾C2 =
; Y8, Y9 ¾C2 = ![]() ; Y18, Y19 ¾C3 =
; Y18, Y19 ¾C3 = ![]() и Y25, Y26 ¾C4=
и Y25, Y26 ¾C4=![]()
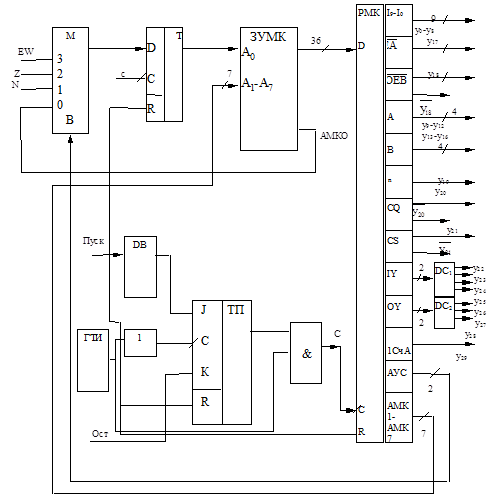
Формирование констант С1 ¾ С4 предполагает выполнение микрокоманд сдвига вправо и влево. Для обоих сдвигов в освободившиеся разряды записывается нуль.Организация сдвигов достигается подключением к входам - выходам сдвигов повторителей с тремя состояниями, на вход которых подан логический нуль. Все управляющие сигналы формирует устройство управления, схема которого показана на рис.2.
Устройство управления включает в себя память микрокоманд (ЗУМК), регистр микрокоманд, дешифратор источников шины Y (DC1), дешифратор приёмников шины Y(DC2), коммутатор условий М, D - триггер для хранения младшего разряда адреса ЗУМК, генератор тактовых импульсов (ГТИ), схему «пуска-останова», включающую в себя триггер пуска (ТП), одновибратор (ОВ), инвертор и схему «И».
Данное устройство является микропрограммным устройством с принудительной адресацией.
Адрес следующей микрокоманды задаётся непосредственно в соответствующем поле (АМК0 - АМК7).
Организация условных переходов осуществляется путём модификации младшего разряда адреса, на вход которого в зависимости от кода условия (АУС) через мультиплексор подаются сигналы по значениям которых необходимо произвести переход. Для реализации алгоритма достаточно два разряда для кода условия. Значения кодов условия (АУС) и соответствующие им сигналы приведены в табл. 2.
микропроцессор аппаратный переменная программа
Таблица 2 ¾ Коды условий
| АУС | Сигналы |
| 0 | АМК0 |
| 1 | N(знак) |
| 2 | Z(нуль) |
| 3 | EW |
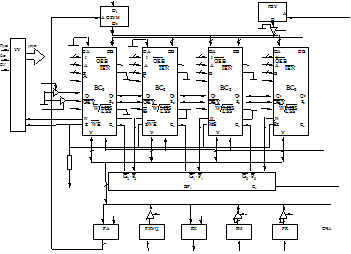
Рисунок 1 ¾ Структурная схема вычислительного устройства на МП
--> ЧИТАТЬ ПОЛНОСТЬЮ <--