Реферат: Синтез адаптивной системы автоматического управления
На рисунке приведена структурная схема последовательного соединения исполнительного механизма и объекта управления.
 |
В качестве исполнительного механизма используется механизм постоянной скорости с ограничением:
 |
Объект управления описывается передаточными функциями вида:
 |
 |
Численные значения параметров исполнительного механизма и объекта управления:
| Вариант | kим | k1 | k2 | T1 | T2 | x1 | x2 |
| 11 | 0,20 | 1,00 | 1,00 | 1,80 | 3,80 | 0,80 | 0,80 |
Задание: Провести анализ динамических свойств объекта управления с использованием графиков переходного процесса и АЧХ. При определении длительности переходного процесса принять D = ±5% от установившегося значения выходной переменной.
Для моделирования системы управления используем программу МВТУ (моделирование в технических устройствах).
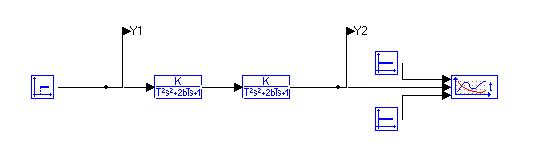
Рис.1 – Объект управления
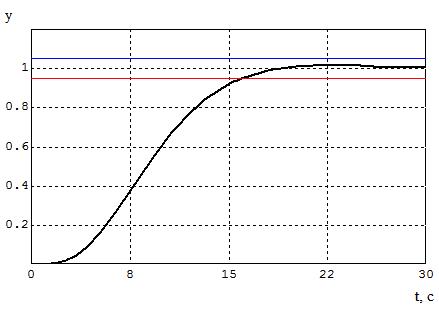
Рис.2 – График переходного процесса
По графику видно, что система является устойчивой с плавным переходным процессом без перерегулирования. Установившееся значение выходной переменной составляет 1. Из списка значений графика можно определить, что максимальное значение составляет 1.01547. Время переходного процесса составляет 15.99 с.
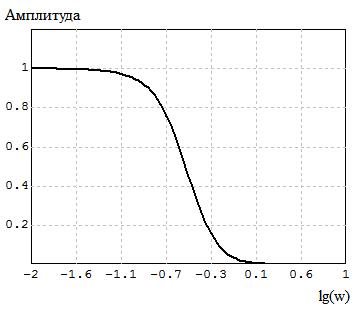
Рис.3 – График АЧХ
АЧХ показывает, во сколько раз амплитуда сигнала на выходе системы отличается от амплитуды входного сигнала на всём диапазоне.
А max = A0 = 1;
Частота среза : A = 0.01 ω c = 0,0551;
Полоса пропускания : A = 0.707 ωп = 0,6316.
2 РАЗРАБОТКА ЛИНЕЙНОГО РЕГУЛЯТОРА
Параметры ступенчатого входного воздействия:
1) время «включения» скачка t = 0;
2) значение сигнала до скачка Y0 = 0;
3) значение сигнала после скачка Yk = 40.
На рисунке 2.1 изображена схема последовательно соединённых исполнительного механизма и объекта управления, на которые подаётся ступенчатое входное воздействие.
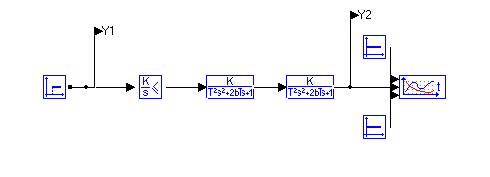
Рисунок 2.1 - Схема последовательно соединённых исполнительного механизма и объекта управления.
График переходного процесса, протекающего в системе управления, изображён на рисунке 2.2.
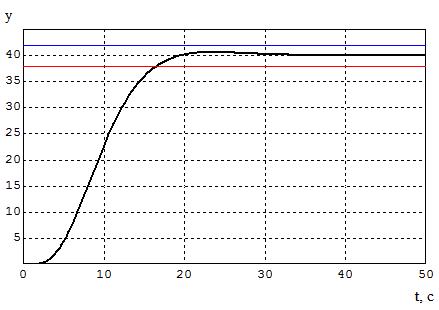
Рисунок 2.2 – Переходной процесс
В заданной схеме 2.1 исполнительный механизм представляет собой интегратор с ограничениями. Поэтому при выборе регулятора необходимо учитывать, что интегральная составляющая в схеме уже присутствует.
Существует два вида регуляторов без интегральной составляющей: П-регулятор и ПД-регулятор. Добавка П-регулятора в систему управления делает её высокоточной в установившемся режиме, но в переходном режиме качество системы ухудшается. Передаточная функция П-регулятора:
![]() .
.
Её соединение с передаточной функцией исполнительного механизма даст:
![]() .
.
Соединение пропорциональной и интегральной составляющих увеличит точность системы управления.
ПД-регулятор улучшает качество системы в переходном режиме, на качество системы в установившемся режиме влияет слабо. Передаточная функция ПД-регулятора:
![]() .
.
Её соединение с передаточной функцией исполнительного механизма даст:
![]() .
.
Соединение пропорциональной и интегральной составляющих увеличит точность системы управления, а соединение дифференциальной и интегральной составляющих увеличит быстродействие системы.
Необходимо получить быстрый переходной процесс без перерегулирования, следовательно, наиболее подходящим для этого является ПД-регулятор. Схема линейного регулятора в системе управления изображена на рисунке 2.3.
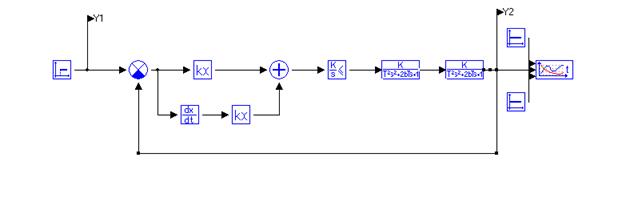
Рисунок 2.3 – Схема с линейным регулятором
3 РАСЧЕТ ПАРАМЕТРОВ РЕГУЛЯТОРА
Для определения численных значений параметров линейного регулятора воспользуемся методом Циглера –Никольса.
Регулятор управляет объектом с такой передаточной функцией:
![]()
Передаточная функция разомкнутой системы:
--> ЧИТАТЬ ПОЛНОСТЬЮ <--