Реферат: Сжатие речевого сигнала на основе линейного предсказания
Система акустических труб – резонансная система, поэтому если фильтр без потерь, то на его АЧХ будут наблюдаться разрывы (всплески в бесконечность). Реально на месте этих всплесков будут резонансные пики, и резонансные частоты таких пиков называются формантными. Обычно в реальных голосовых трактах человека формантных частот (или формант) не более трех. Более подробно о коэффициентах отражения и решетчатых фильтрах можно прочитать в [2, глава 3].
Так как коэффициенты отражения и коэффициенты предсказания вычисляются в рамках одной и той же процедуры алгоритма Левинсона-Дурбина, то они могут быть выражены друг через друга. Приведем здесь эти алгритмы.
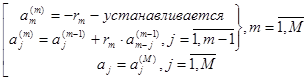
Прямая рекурсия (коэффициенты отражения -коэффициенты предсказания):
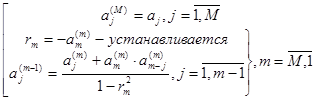
Обратная рекурсия (коэффициенты предсказания -коэффициенты отражения):
Как уже было сказано, фильтры сигнала ошибки представляют собой КИХ фильтры или нерекурсивные фильтры, что означает отсутствие ветвей обратной связи. Системы с КИХ также могут обладать строго линейной ФЧХ. Линейность ФЧХ является очень важным обстоятельством применительно к РС в тех случаях, когда требуется сохранить взаимное расположение элементов сигнала. Это существенно облегчает задачу их проектирования и позволяет уделять лишь внимание аппроксимации их АЧХ. За это достоинство приходится расплачиваться необходимостью аппроксимации протяженной импульсной реакции в случае фильтров с крутыми АЧХ [2].
Изобразим граф фильтра, имеющего решетчатую структуру, на примере фильтра 3–го порядка:
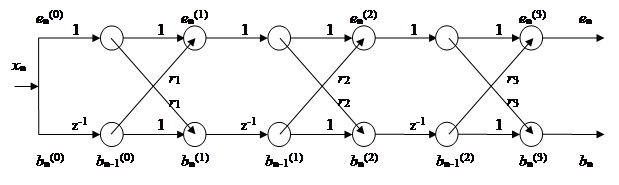
В отличие от формирующего фильтра этот фильтр имеет один вход и два выхода:
1) ei – последовательность отсчетов сигнала ошибки прямого линейного предсказания;
2) bi – последовательность отсчетов сигнала ошибки обратного линейного предсказания.
![]()
Важность bi определяется тем, что по нему совместно с сигналом ошибки ei могут быть оценены коэффициенты отражения.
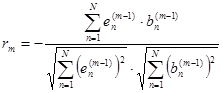 ,
,
где N – количество отсчетов в сегменте.
Полученная формула для расчета коэффициентов отражения имеет также другой физический смысл. Это не что иное, как коэффициент корреляции между последовательностью отсчетов сигнала ошибки прямого и обратного линейных предсказаний.
Приведем также рекуррентные разностные уравнения решетчатого фильтра сигнала ошибки:
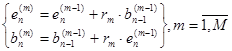
![]() выход фильтра;
выход фильтра;
Начальные условия для этой рекуррентной процедуры:
![]()
Реализация ДИКМ
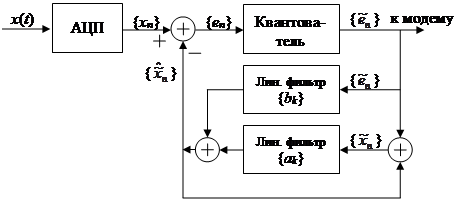
Имея метод определения коэффициентов предсказания, рассмотрим блок-схему практической системы ДИКМ, показанную ниже.
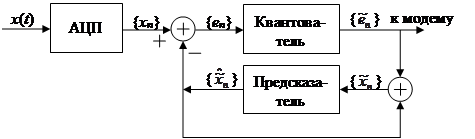
В этой схеме предсказатель стоит в цепи обратной связи, охватывающей квантователь. Вход предсказателя обозначен ![]() . Он представляет собой сигнальный отсчет
. Он представляет собой сигнальный отсчет ![]() , искаженный в результате квантования сигнала ошибки. Выход предсказателя равен:
, искаженный в результате квантования сигнала ошибки. Выход предсказателя равен:
![]() ; (**)
; (**)
Разность ![]() является входом квантователя, а
является входом квантователя, а ![]() обозначает его выход. Величина квантованной ошибки предсказания
обозначает его выход. Величина квантованной ошибки предсказания ![]() кодируется последовательностью двоичных символов и передается через канал в пункт приема. Квантованная ошибка
кодируется последовательностью двоичных символов и передается через канал в пункт приема. Квантованная ошибка ![]() также суммируется с предсказанной величиной
также суммируется с предсказанной величиной ![]() , чтобы получить
, чтобы получить ![]() .
.
В месте приема используется такой же предсказатель, как на передаче, а его выход ![]() суммируется с
суммируется с ![]() , чтобы получить
, чтобы получить ![]() (см. рис. ниже).
(см. рис. ниже).
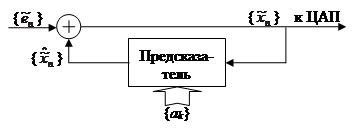
Сигнал ![]() является входным воздействием для предсказателя и в то же время образует входную последовательность, по которой с помощь ЦАП восстанавливается сигнал x (t ). Использование обратной связи вокруг квантователя обеспечивает то, что ошибка в
является входным воздействием для предсказателя и в то же время образует входную последовательность, по которой с помощь ЦАП восстанавливается сигнал x (t ). Использование обратной связи вокруг квантователя обеспечивает то, что ошибка в ![]() - просто ошибка квантования
- просто ошибка квантования ![]() и что здесь нет накопления предыдущих ошибок квантования при декодировании. Имеем
и что здесь нет накопления предыдущих ошибок квантования при декодировании. Имеем
![]()
Следовательно, ![]() . Это означает, что квантованный отсчет
. Это означает, что квантованный отсчет ![]() отличается от входа
отличается от входа ![]() ошибкой квантования
ошибкой квантования ![]() независимо от использования предсказателя. Значит, ошибки квантования не накапливаются.
независимо от использования предсказателя. Значит, ошибки квантования не накапливаются.
В рассмотренной выше системе ДИКМ оценка или предсказанная величина ![]() отсчета сигнала
отсчета сигнала ![]() получается посредством линейной комбинации предыдущих значений
получается посредством линейной комбинации предыдущих значений ![]() , k = 1, 2, …, M, как показано в формуле (**). Улучшение качества оценки можно получить включением в оценку линейно отфильтрованных последних значений квантованной ошибки.
, k = 1, 2, …, M, как показано в формуле (**). Улучшение качества оценки можно получить включением в оценку линейно отфильтрованных последних значений квантованной ошибки.
Конкретно, оценку ![]() можно выразить так:
можно выразить так:
![]() ,
,
где {![]() } – коэффициенты фильтра для квантованной последовательности ошибок
} – коэффициенты фильтра для квантованной последовательности ошибок ![]() . Блок-схемы кодера на передаче и декодера на приеме приведены ниже.
. Блок-схемы кодера на передаче и декодера на приеме приведены ниже.
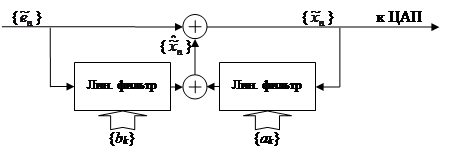
Здесь два ряда коэффициентов {![]() } и {
} и {![]() } выбираются так, чтобы минимизировать некоторую функцию ошибки
} выбираются так, чтобы минимизировать некоторую функцию ошибки ![]() , например среднеквадратическую ошибку.
, например среднеквадратическую ошибку.
Адаптивная дифференциальная импульсно-кодовая модуляция
Многие реальные источники (например, источники РС), как уже было сказано выше, являются квазистационарными по своей природе. Одно из свойств квазистационарности характеристик случайного выхода источника заключается в том, что его дисперсия и автокорреляционная функция медленно меняются со временем. Кодеры ИКМ и ДИКМ, однако, проектируются в предположении, что выход источника стационарен. Эффективность и рабочие характеристики таких кодеров могут быть улучшены, если они будут адаптироваться к медленно меняющейся во времени статистике источника. Как в ИКМ, так и в ДИКМ ошибка квантования ![]() , возникающая в равномерном квантователе, работающем с квазистационарным входным сигналом, будет иметь меняющуюся во времени дисперсию (мощность шума квантования).
, возникающая в равномерном квантователе, работающем с квазистационарным входным сигналом, будет иметь меняющуюся во времени дисперсию (мощность шума квантования).
Одно улучшение, которое уменьшает динамический диапазон шума квантования, - это использование адаптивного квантователя. Другое – сделать адаптивным предсказатель в ДИКМ. При этом коэффициенты предсказателя могут время от времени меняться, чтобы отразить меняющуюся статистику источника сигнала. И полученная СЛАУ, для решения которой используется алгоритм Левинсона – Дурбина, остается справедливой и с краткосрочной оценкой автокорреляционной функции B (i ) (при принятых обозначениях B (i ) – уже кратковременная АКФ), поставленной вместо оценки функции корреляции по ансамблю. Определенные таким образом коэффициенты предсказателя могут быть вместе с ошибкой квантования ![]() переданы приемнику, который использует такой же предсказатель. К сожалению, передача коэффициентов предсказателя приводит к увеличению необходимой битовой скорости, частично компенсируя снижение скорости, достигнутое посредством квантователя с немногими битами (немногими уровнями квантования) для уменьшения динамического диапазона ошибки
переданы приемнику, который использует такой же предсказатель. К сожалению, передача коэффициентов предсказателя приводит к увеличению необходимой битовой скорости, частично компенсируя снижение скорости, достигнутое посредством квантователя с немногими битами (немногими уровнями квантования) для уменьшения динамического диапазона ошибки ![]() , получаемой при адаптивном предсказании.
, получаемой при адаптивном предсказании.
В качестве альтернативы предсказатель приемника может вычислить свои собственные коэффициенты предсказания через ![]() и
и ![]() , где
, где
![]() ;
;
Если пренебречь шумом квантования, ![]() эквивалентно
эквивалентно ![]() . Следовательно,
. Следовательно, ![]() можно использовать для оценки АКФ B (i ) в приемнике, и результирующие оценки могут быть использованы в СЛАУ вместо B (i ) при нахождении коэффициентов предсказателя. При достаточно большом числе уровней квантования разность между
можно использовать для оценки АКФ B (i ) в приемнике, и результирующие оценки могут быть использованы в СЛАУ вместо B (i ) при нахождении коэффициентов предсказателя. При достаточно большом числе уровней квантования разность между ![]() и
и ![]() очень мала. Следовательно, оценка B (i ), полученная через
очень мала. Следовательно, оценка B (i ), полученная через ![]() , может быть использована для определения коэффициентов предсказателя. Выполненный таким образом адаптивный предсказатель приводит к низкой скорости кодирования данных источника.
, может быть использована для определения коэффициентов предсказателя. Выполненный таким образом адаптивный предсказатель приводит к низкой скорости кодирования данных источника.
Вместо использования блоковой обработки для нахождения коэффициентов предсказателя {![]() }, как описано выше, мы можем адаптировать коэффициенты предсказателя поотсчетно, используя алгоритм градиентного типа, который мы и рассмотрим.
}, как описано выше, мы можем адаптировать коэффициенты предсказателя поотсчетно, используя алгоритм градиентного типа, который мы и рассмотрим.