Реферат: Высокомоментные двигатели
Соответственно e может принимать значения 0...1.
 ,
,
где
![]() .
.
Для осуществления способа используют транзисторные или тиристорные ключи.
1.9.3 Регулирование скорости изменением Ua .
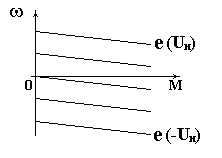
Рисунок 1.9.3.1 - Механические характеристики
Скорость
![]() ,
,
Причем ![]() и
и ![]() .
.
1.9.4 Регулирование скорости путем изменения потока возбуждения.
В связи с тем, что поле возбуждения создается постоянным магнитом, регулирование скорости путем уменьшения потока Ф неосуществимо.
1.10 Расчет потерь энергии.
Потери энергии в установившемся режиме определяются
![]() .
.
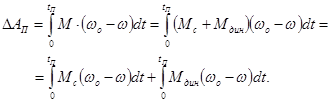
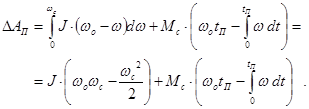
Потери энергии во время переходных процессов определяются
 .
.
1.10.1 Пуск двигателя.
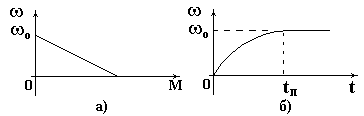
Рисунок 1.10.1.1
При Mc =0.
Значение динамического момента
![]() .
.
 ,
,
![]() .
.
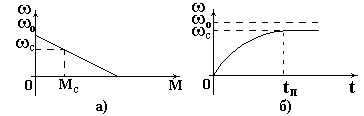
Рисунок 1.10.1.2
При Mc =const.
![]() ;
; ![]() .
.
![]()
![]()
Если Мс – мал, то
![]()
1.10.2 Динамическое торможение.
Мс =0 .
![]()
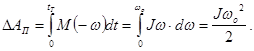
Mc =const.

2 ВЫБОР ВМД И ТАХОГЕНЕРАТОРА ДЛЯ ЛАБОРАТОРНОГО СТЕНДА. РАЗРАБОТКА ИМПУЛЬСНОГО ИСТОЧНИКА ПИТАНИЯ. ВЫБОР ПРИБОРОВ И УСТРОЙСТВ ИЗМЕРЕНИЯ И КОНТРОЛЯ
2.1 Выбор вмд и тахогенератора для лабораторного стенда
В зависимости от поставленной цели (задачи) определяем необходимую мощность, величину момента, который развивает двигатель и доступные к использованию источники питания, а также конструктивное исполнение высокомоментного двигателя, отвечающего требованиям данной задачи. Исходя из указанных параметров, а также учитывая располагаемое разработчиками оборудование, был выбран коллекторный моментный двигатель с неограниченным углом поворота ротора серии PIVT 6/3A.
Поскольку в данной лабораторной работе предусмотрен рпыт снятия механических характеристик, то необходим тахогенератор. Достоинством выбранной машины является то, что ее конструкция содержит тахогенератор в одном корпусе с двигателем.
2.2 Требуется рассчитать основные параметры широтно-импульсного модулятора, нагрузкой которого является цепь якоря двигателя постоянного тока. Номинальное напряжение якорной цепи двигателя 30 вольт.
Широтно-импульсный преобразователь предназначен для преобразования входного сигнала в прямоугольные импульсы. Схема ШИПа представлена в приложении.
На вход генератора пилообразного напряжения (далее ГПН), изображенного в приложении 3, подается напряжение минус 15 вольт. В основе ГПН лежит компаратор. При подаче сигнала емкость С9 начинает заряжаться и на выходе компаратора DA5 формируется линейно нарастающий сигнал. В начальный момент времени транзистор VT9 заперт. Далее этот нарастающий сигнал поступает на вход компаратора DA6, где он сравнивается с напряжением задания (оно задается R36). В момент совпадения напряжений, на выходе компаратора DA6 появится импульс отрицательной полярности, который ограничивается стабилитронами VS1 и VS2. Этот импульс подается на базу транзистора VT12, который в начальный момент времени был открыт. Транзистор VT12 при поступлении сигнала закроется. Вследствие этого база транзистора VT9 окажется подключенной к источнику плюс 15 вольт. Транзистор VT9 откроется и емкость С9 окажется зашунтированной через VT9. В результате ГПН перестанет вырабатывать линейно нарастающий сигнал. Компаратор DA6 поменяет сигнал на выходе и откроется транзистор VT12. Транзистор VT9 снова окажется закрытым и ГПН опять начнет вырабатывать «пилу». Далее процесс повторяется.
Пилообразное напряжение с ГПН подается на компаратор DA7, где оно сравнивается с напряжением управления (скважность) и на выходе компаратора DA7 формируется сигнал положительной и отрицательной полярности. Эти разнополярные сигналы будут отпирать транзисторы VT10 и VT11. В результате напряжения плюс и минус 15 вольт подаются на светодиоды гальванической развязки, основанной на оптоэлектронной интегральной микросхеме. С фотоприемника этот сигнал поступает на составной транзистор (схема Уилтона) VT18, VT22; VT21, VT17; VT23, VT19; VT24, VT20, где он усиливается и подается на базы транзисторов VT13, VT16 и VT15, VT14. Транзисторы VT13, VT16 и VT14, VT15 открываются попарно, подключая цепь якоря двигателя к источнику питания. С помощью изменения скважности сигнала (это делается переменным резистором R32) можно регулировать продолжительность по времени положительных и отрицательных импульсов.
2.3 Выбор элементов ШИПа
В качестве операционных усилителей DA6 и DA7 возьмем микросхему К157УД2. Операционный усилитель DA7 возьмем типа К140УД7.
Гальваническая развязка в силовой части осуществляется с помощью оптоэлектрических интегральных микросхем типа К262КП1Б (оптронный повторитель). Транзисторы в силовой цепи VT13¸VT16 выбираем типа КТ503В с данными: