Учебное пособие: Проектирование автомобильных дорог
Таблица 4 – Результаты расчетов максимальных продольных уклонов, преодолеваемых легковым автомобилем
| Передачи | Значение Дmax | Величина fV | Скорость км/ч | |
| I | 0,042 | 0,02 | 25 | 0,042-0,02=0,022=22 ‰ |
| II | ||||
| III | ||||
| IV |
Полученные расчетом величины imax для грузового и легкового автомобилей сравниваются с imax для данной технической категории дороги, приведенными в СНиП 2.05.02-85 (табл. 10).
3.2.3 Определение нормативных радиусов для проектирования кривых в плане
Радиус кривой в плане, при котором возможно движение автомобиля с расчетной скоростью при условии устройства виража, переходных кривых и уширения проезжей части, определяется по формуле:
 , (16)
, (16)
гдеV – расчетная скорость движения для данной категории дороги, км/ч;
iв – поперечный уклон проезжей части на вираже (принимается в соответствии с требованиями СНиП 2.05.02-85, табл. 8);
μ – коэффициент поперечной силы, принимаемый по графику (рисунок 2).
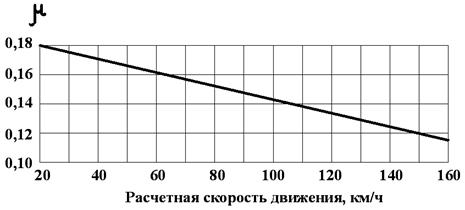
Рисунок 2 – График зависимости коэффициента поперечной силы от скорости движения автомобиля [1]
Значение коэффициента поперечной силы µ должно удовлетворять одновременно условиям устойчивости автомобиля против опрокидывания, устойчивости против заноса, удобства пассажиров при проезде по кривой и экономичности работы автомобиля.
Рекомендуется для определения радиуса, не требующего переходных кривых и виража, принимать для дорог I и II категорий µ=0,05 и для дорог III категории (и ниже) – µ=0,1.
При определении наименьшего радиуса, применяемого на трудных участках, в зависимости от сложности вписывания кривой может быть допущена величина μ=0,15 – 0,20. При сравнительно простых условиях проектирования следует принимать μ=0,10, особенно для дорог высокой категории.
По условию видимости в ночное время минимальный радиус кривой вычисляется по формуле:
![]() , (17)
, (17)
гдеS1 – расстояние видимости поверхности дороги, определенное по СНиП 2.05.02-85 (табл. 10) для заданной расчетной скорости движения, м;
α – угол расхождения пучка света фар (α ≈ 2°).
Наименьшие радиусы кривых в плане без устройства виража рассчитываются по формуле:
 , (18)
, (18)
гдеi1 – поперечный уклон проезжей части, ‰ (определяется по СНиП 2.05.02-85, табл. 7).
Вычисленные радиусы кривых в плане сравниваются с приведенными в СНиП 2.05.02-85.
3.2.4 Определение расстояний видимости
В теории проектирования дорог предложено несколько схем видимости по условиям движения автомобилей и расположению автомобилей и препятствий на дороге. Принципиально различают следующие группы:
1. Схемы, предусматривающие остановку автомобиля перед препятствием или встречным автомобилем.
Расчетное расстояние видимости поверхности дороги находится из выражения:
 . (19)
. (19)
гдеV – расчетная скорость движения по проектируемой автомобильной дороги;
Кэ – коэффициент, учитывающий эффективность тормозов (для легкового автомобиля принимается К=1,3; для грузовых и автобусов – К=1,85);
φ1 – коэффициент продольного сцепления, принимается равным 0,50;