Учебное пособие: Проектирование цифрового автомата
Эти триггеры выполнены на логических элементах ИЛИ-НЕ и являются асинхронными RS-триггерами с прямым управлением, т.е. переключаются сигналами логической единицы. В табл.5 описываются состояния, характеризующие работу триггера.
Таблица 5
Состояния RS-триггера с прямым управлением
| Такт tn | Такт tn+1 | |||
| Qn | Rn | Sn | Qn+1 | |
| 0 | 0 | 0 | 0 | 1 |
| 0 | 0 | 1 | 1 | 0 |
| 0 | 1 | 0 | 0 | 1 |
| 0 | 1 | 1 | Н/О | Н/0 |
| 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 1 | 1 | 0 |
| 1 | 1 | 0 | 0 | 1 |
| 1 | 1 | 1 | Н/О | Н/О |
Каждый триггер имеет два входа S и R и один выход Q (выходы ![]() к внешним выводам микросхемы не подключены). Характерной особенностью этой ИМС является наличие разрешающего входа V – общего для всех четырех триггеров. Когда на этом входе единичный сигнал – информация на выходах триггера присутствует, при логическом нуле – нет. Вход, по которому RS-триггер устанавливается в состояние 1, обозначается буквой S, а в состояние 0 – буквой R. Если на один из входов подать единичный сигнал, сохраняя нулевой на другом, триггер примет состояние, которое однозначно определяется входной информацией. При входных сигналах S=1, R=0 триггер принимает единичное состояние Q=1,
к внешним выводам микросхемы не подключены). Характерной особенностью этой ИМС является наличие разрешающего входа V – общего для всех четырех триггеров. Когда на этом входе единичный сигнал – информация на выходах триггера присутствует, при логическом нуле – нет. Вход, по которому RS-триггер устанавливается в состояние 1, обозначается буквой S, а в состояние 0 – буквой R. Если на один из входов подать единичный сигнал, сохраняя нулевой на другом, триггер примет состояние, которое однозначно определяется входной информацией. При входных сигналах S=1, R=0 триггер принимает единичное состояние Q=1, ![]() =0, а при S=0, R=1 – нулевое: Q=0,
=0, а при S=0, R=1 – нулевое: Q=0, ![]() =1.
=1.
При появлении управляющего сигнала на одном из входов происходит либо опрокидывание триггера, либо подтверждение существующего состояния, если оно совпадает с требуемым. Если одновременно подать переключающие сигналы на оба входа (S=R=1), на обоих выходах появятся логические нули (Q=![]() =0) и устройство утратит свойство триггера. Комбинацию S=R=1 называют неопределенной (Н/О). Переход от неопределенной комбинации к нейтральной (S=R=0) называют запрещенной комбинацией, так как состояние выходов при этом восстанавливается, но с равновероятностью оно может стать как единичным, так и нулевым. Это ведет к непредсказуемому поведению триггера.
=0) и устройство утратит свойство триггера. Комбинацию S=R=1 называют неопределенной (Н/О). Переход от неопределенной комбинации к нейтральной (S=R=0) называют запрещенной комбинацией, так как состояние выходов при этом восстанавливается, но с равновероятностью оно может стать как единичным, так и нулевым. Это ведет к непредсказуемому поведению триггера.
Для синтеза ЦА необходимо применить синхронный (тактируемый) RS-триггер. Однако в известных сериях микросхем синхронные RS-триггеры как самостоятельные изделия отсутствуют.
Применение синхронного триггера позволяет увеличить помехоустойчивость схемы, т.е. исключить ложные срабатывания триггера из-за возможного возникновения состязания сигналов (гонок) или от помех. Опрокидывание синхронного триггера происходит только при участии тактовых импульсов, длительность которых гораздо меньше их периода. В остальное время на входные сигналы, равно как и помехи различного происхождения, триггер не реагирует.
Синхронный (тактируемый) RS-триггер получают из асинхронного RS-триггера путем подключения к его выводам схемы управления, состоящей из логических элементов И-НЕ (рис.4).
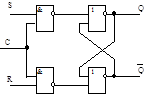
Рис.4. Логическая структурная схема синхронного RS-триггера со статическим управлением.
Полученный синхронный RS-триггер будет управляться следующим образом: переброс триггера осуществляется сигналами Sn=0, Rn=0 при С=0, т.е. нулевыми логическими уровнями. Он оказывается синхронным RS-триггером с инверсным управлением. Для реализации такого триггера совместно с микросхемой 564ТР2 следует применить две микросхемы 564ЛА7, каждая их которых содержит по четыре логических элемента 2 И-НЕ. На функциональной схеме синхронный RS-триггер с инверсным управлением обозначают согласно рис.5.
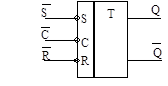
Рис.5. Синхронный RS-триггер с инверсным управлением
Для реализации синхронного RS-триггера с прямым управлением следовало бы совместно с микросхемой 564ТР2 применить микросхемы, содержащие двухвходовые элементы И. Однако в сериях микросхем К176, К561, К564 таких элементов нет, а применение подходящих других элементов из этих серий существенно усложнит принципиальную электрическую схему ЦА. Для синтеза ЦА целесообразно использовать синхронный RS-триггер с инверсным управлением, который может быть реализован из микросхем 564ТР2 и 564ЛА7.
Поэтому выполняют регистр на синхронных RS-триггерах с инверсным управлением, которые работают так, что:
1) Если такой триггер должен перейти из нуля в единицу, то к приходу тактового импульса на тактовый вход нужно обеспечить S=0, R=1.
2) Если триггер должен опрокинуться из единицы в нуль, следует к приходу тактового импульса установить S=1, R=0.
3) Если же требуется сохранить состояние триггера "единица", то необходимо к приходу тактового импульса установить S=X, R=1, т.е. сигнал на входе S может быть либо 0, либо 1 и не влияет на поведение триггера.
4) Если триггер должен остаться в состоянии "ноль", то нужно к приходу тактового импульса установить S=1, R=X, т.е. сигнал на входе R не влияет на поведение триггера.
Закон функционирования синхронного RS-триггера с инверсным управлением можно также представить в виде табл.6.
Таблица 6
Закон функционирования синхронного RS-триггера с инверсным управлением
| Такт tn | Такт tn+1 | ||
| Qn | Rn | Sn | Qn+1 |
| 0 | 0 | 0 | Н/О |
|
Продолжение табл.6 | |||
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | Н/О |
| 1 | 0 | 1 | 1 |
| 1 | 1 | 0 | 0 |
| 1 | 1 | 1 | 1 |
Если учесть, что Qn+1 зависит только от Sn и Rn, то из табл.6 можно исключить столбец Qn и получить минимизированную табл.7.
Таблица 7
Состояния синхронного RS-триггера с инверсным управлением (минимизированная форма) при C=0
| Sn | Rn | Qn+1 |
| 0 | 0 | Н/О |
| 0 | 1 | 1 |
| 1 | 0 | 0 |
| 1 | 1 | Qn |
Используя таблицу состояний ЦА (табл.2), таблицу функции переходов (табл.3), таблицу функции выходов (табл.4) и таблицу состояний синхронного RS-триггера с инверсным управлением (табл.7), составляют полную таблицу функционирования ЦА (табл.8). Переход от одного состояния ЦА к другому осуществляется под воздействием тактовых импульсов Ф, поступающих одновременно на тактовые входы всех четырех триггеров.
К приходу очередного тактового импульса на управляющих входах (R, S) триггеров должны существовать сигналы, обеспечивающие срабатывание только тех триггеров, которые должны изменить свое состояние при переходе к следующей кодовой комбинации. Таким образом, для каждой кодовой группы, характеризующей состояние регистра, необходимо найти сигналы на управляющих выходах триггеров, обеспечивающих переход к следующей кодовой группе.
В табл.8 указывают значения сигналов, которые должны быть поданы на управляющие входы триггеров для того, чтобы обеспечить переход от данного состояния регистра к последующему.