Дипломная работа: Автоматизированная система мониторинга расхода топлива
На рисунке 2.1 приведена общая схема организации распределённой измерительной системы.
В машинном отделении монтируется датчику уровня и вторичный преобразователь уровня. Датчик уровня размещается в цистерне, причём его чувствительный элемент монтируется в перфорированной трубе. Вторичный преобразователь крепится на специальной металлической площадке, приваренной к стене машинного отделения.
Выход вторичного преобразователя подключается к аналоговому входу микроконтроллера. Для соединения вторичного преобразователя и контроллера используется трехжильный провод. Две жилы – для питания, третья – для передачи токового сигнала.
Датчики оборотов двигателей представляют собой нормально разомкнутые магнитные размыкатели, основанные на эффекте Холла. Датчики крепятся в непосредственной близости от валов двигателей. На валы двигателей, строго напротив датчиков, с помощью клея крепятся магниты.
Выходы датчиков подключаются к дискретным входам контроллера. На каждый датчик подаётся постоянное напряжение питания. Поэтому в обычном состоянии на вход контроллера подступает постоянное напряжения питания 24 В, что соответствует логической единице.
В момент прохождения магнита мимо датчика происходит размыкание питающей цепи, что вызывает падение напряжения на дискретном входе контроллера. Это воспринимается контроллером как смена сигнала из логической единицы на логический ноль, что соответствует одному обороту вала.
Для сигнализации о переполнении топливной цистерны, и также о низком уровне топлива, используются релейные выходы вторичного преобразователя. Через них подключаются световые и звуковые сигнализаторы уровня.
В блоке управления вторичного преобразователя программируются две метки: верхняя и нижняя. При достижении уровня топлива, соответствующего верхней метке, происходит срабатывание первого реле. Аналогично работа организована с нижней меткой.
Выходной сигнал вторичного преобразователя уровня стандартизирован и нормирован. Для токовых сигналов (которые используются во взрывобезопасных приложениях) существует два диапазона нормирования: 0..20 мА или 4..20 мА. Большинство типов промышленного контрольно-измерительного оборудования поддерживает указанные диапазоны сигналов.
Диапазон 0..20 позволяет более точно провести передачу сигнала, поскольку диапазон изменения больше. Нужный диапазон задаётся непосредственно на вторичном преобразователе.
Контроллер производит оцифровку значения тока на аналоговом входе и вычисление уровня топлива.
Данные передаются в компьютер через последовательный порт, где с ними производится дальнейшая обработка. Алгоритмы обработки и структура программного обеспечения будут рассмотрены ниже.
Постоянная связь системы с диспетчерским пультом поддерживается с помощью терминала спутниковой системы Inmarsat. Терминал подключается в ПЭВМ также через последовательный порт. Управление сеансами связи производится программным модулем, работающим на ПЭВМ капитана судна.
Этот программный модуль осуществляет в автоматическом режиме оптравку значения уровня топлива и частот вращения валов двигателей на диспетчерский пульт.
Кроме этого, спутниковый терминал позволяет получать GPS-информацию: координаты судна, скорость, направление движения.

Рисунок 2.1 - Общая схема организации распределённой измерительной системы
Используемый в системе промышленный контроллер поддерживает передачу SMS-сообщений через GSM-модем.
Посредством SMS-сообщений контроллер также может в автоматическом режиме передавать указанные выше данные, не используя спутниковую связь. Использование альтернативного канала позволяет экономить денежные средства, поскольку трафик, проходящий через спутниковую систему значительно дороже, чем трафик через наземные GSM-станции.
Однако, GSM-канал ограничен в использовании, поскольку часть времени судно находится вне покрытия сотовых сетей. Вместе с этим, логика работы программного обеспечения позволяет наладить его эффективную работу, поскольку основной маршрут судна пролегает по реке, вблизи городов. Это позволяет отправлять сообщения при попадании судна в зону действия сотовых сетей и только в случаях, когда судно длительное время находится вне зоны действия сотовых сетей, задействуется спутниковый канал.
GSM-канал позволяет также осуществлять управление системой посредством команд, посылаемых с сотового телефона диспетчера в виде SMS-сообщений. Эта возможность имеет существенные преимущества, поскольку позволяет руководителю транспортной компании в любой момент запрашивать текущую информацию о судне с сотового телефона.
2.2 Структура программного обеспечения распределённой ИИС
Программное обеспечение физически состоит из трёх компонентов: управляющая программа для контроллера, клиентское приложение на ПЭВМ капитана судна и серверное приложение на ПЭВМ диспетчера.
Структура взаимодействия компонентов ПО показана на рисунке 2.2.
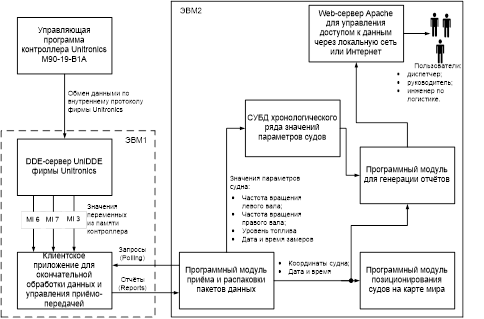
Рисунок 2.2 - Структура программного обеспечения автономной распределённой ИИС
2.3 Линейная аппроксимация градуировочной характеристики
Градуировочная характеристика определяет зависимость между уровнем топлива в цистерне и его объёмом. Данная зависимость задаётся табличным способом. При этом характеристика для груженого состояния судна отличается от характеристики в балластном состоянии. Соответственно, имеется две градуировочные таблицы. Каждая из таблиц содержит по 300 отсчётов уровня. Данные таблицы приведены в приложениях А и Б.
Клиентское приложение массу топлива рассчитывает по таблице, полученной путём усреднения данных из двух указанных таблиц. Полученная таблица имеет существенный объём и не может быть занесена непосредственно в память контроллера целиком. Поэтому была проведена линеаризация градуировочной характеристики линейными регрессионными уравнениями. Поскольку операционная система контроллера не работает с вещественными числами, все данные из таблиц были умножены на 100. полученная характеристика приведена на рисунке 2.3.