Дипломная работа: Автоматизированная система мониторинга расхода топлива
На рисунке 2.5 приведён график абсолютной погрешности аппроксимации для всех табличных значений.
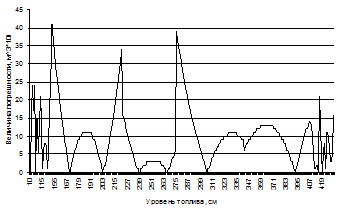
Рисунок 2.5 - Абсолютная погрешность аппроксимации
На рисунке 2.6 приведён график относительной погрешности аппроксимации для всех табличных значений.

Рисунок 2.6 - Относительная погрешность аппроксимации
Достигнутые значения погрешностей являются приемлемыми при данных условиях. Кроме этого, значения объёма, полученные с помощью указанных уравнений, являются приблизительными. Точные значения по полным градуировочным таблицам вычисляются в программном модуле диспетчера [5].
2.4 Структура управляющей программы микроконтроллера
Управляющая программа микроконтроллера разработана в редакторе Ladder, входящего в комплект поставки микроконтроллера.
Программа выполняется циклически, длительность цикла составляет 0,01 с. Алгоритм работы состоит из следующих этапов.
Линеаризация аналогового сигнала с датчика уровня. На этом этапе определяется значение уровня в сантиметрах из соотношения: 20 мА соответствует максимальному уровню 5метров. Операционная система имеет встроенную функцию линеаризации, которая доступна через системные переменные. Для этого операнды записываются в ячейки памяти, SI80-SI83, после чего для активизации функции устанавливается системный бит SB80. Соответствующий фрагмент программы представлен на рисунке 2.3.
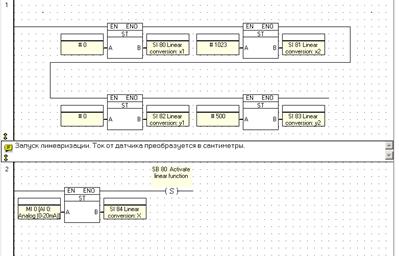
Рисунок 2.7 - Фрагмент программы, выполняющий линеаризацию
Вычисление объёма и массы топлива по его уровню. Производится с помощью совокупности линейных уравнений, описанных выше. После получения значения уровня производится выбор соответствующего уравнения. На рисунке 2.8 показан фрагмент программы, в котором производится вычисление объёма топлива в цистерне .
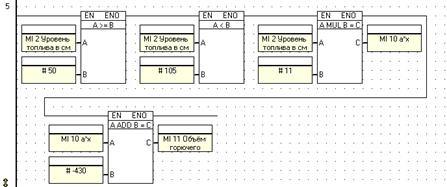
Рисунок 2.8 - Фрагмент программы вычисления объёма топлива в цистерне
Масса топлива рассчитывается путём умножения объёма на коэффициент преобразования, который равен 0,84 тонн/кубометр.
Алгоритм работы программы вычисления объёма и массы топлива приведён на рисунке 2.9.
Вычисление частоты вращения валов двигателей. Контроллер осуществляет подсчёт количества импульсов, поступающих на цифровые входы №8 и №9 за единицу времени, после чего производится пересчёт полученного значения в значение с размерностью ![]() . Измерение интервала времени производится с помощью встроенного таймера. Отсчёт оборота производится по первому срезу входного импульса.
. Измерение интервала времени производится с помощью встроенного таймера. Отсчёт оборота производится по первому срезу входного импульса.
Фрагмент программы, иллюстрирующий вычисление частоты представлен на рисунке 2.10.
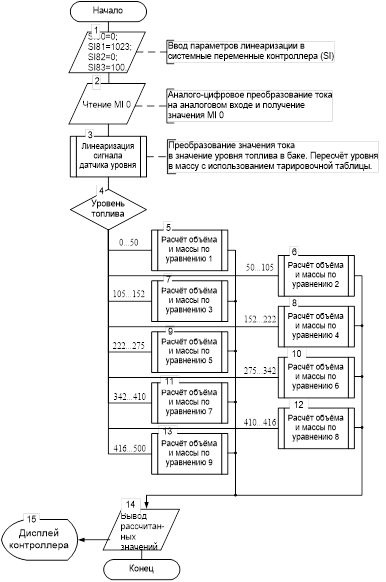
Рисунок 2.9 - Алгоритм работы программы вычисления объёма и массы топлива
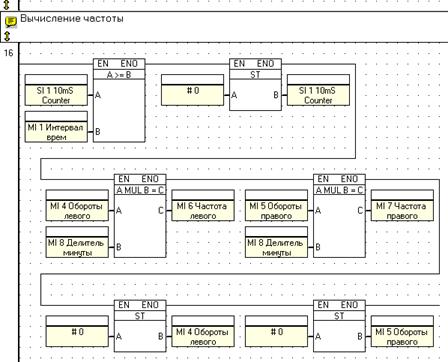
Рисунок 2.10 - Фрагмент программы вычисления частоты вращения валов
Схема алгоритма программы подсчёта импульсов и вычисления частоты вращения валов представлена на рисунке 2.11.
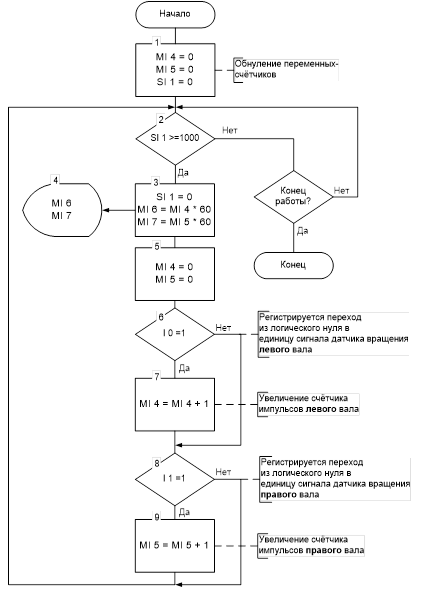
Рисунок 2.11 - Схема алгоритма программы подсчёта импульсов и вычисления частоты вращения валов
2.5 Конфигурирование DDE-сервера UniDDE
Для реализации возможности обмена данными между контроллером и компьютером фирмой Unitronics разработано специальное программное обеспечение – DDE-сервер. С помощью данного ПО различные приложения могут производить обмен данными с контроллером.