Дипломная работа: Контроллер угловой информации
3.1 Использование сигнала UВ
Так как находясь на открытой местности (во избежание сильного изменения диаграммы направленности), антенна обзорного радиолокатора подвержена значительным колебаниям ветра, которые в свою очередь оказывают отрицательное воздействие на работу устройства и могут вызвать ошибки в его работе, была применена простая схема, позволяющая избежать вышеуказанные недостатки. Схема представлена на рисунке 2.
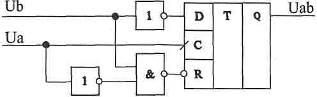
Рисунок 2 - Схема формирования сигнала U АB
Помимо сигналов UA , UR , с двух преобразователей ВАЛ – КОД (датчиков ЛИР-158А) на вход ПЛИС поступают сигналы UB , являющийся сдвинутым на четверть периода сигналом UА .
Как видно из рисунка 2, на тактируемый вход CLK D триггера подается сигнал UА , а сигнал не-UB - поступает на вход D, осуществляя игнорирование любого изменения сигнала UА , пока не закончится импульс UА . Таким образом, срабатывание триггера происходит по фронту сигнала UA , а сбрасывание – по одновременному появлению сигналов не-UА и UB на входе CLRN триггера смотри рисунок 3.
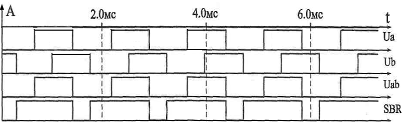
Рисунок 3 - Временные диаграммы формирования UAB
3.2 Выбор частоты синхронизации
Так как для реализации многих функций устройства (самоконтроль, формирователь импульсов, имитатор, формирователь управляющих сигналов питания датчиков) требуется тактирующий сигнал, выбор его частоты осуществим из следующих положений: Исходя из требований ТЗ, устройство должно формировать импульсы заданной длительности 40 ±8 мкс и имеющие определенное взаимное расположение смотри рисунок 4.
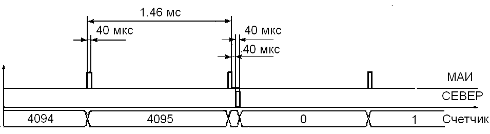
Рисунок 4 - Временные диаграммы формируемых импульсов
Обычно хорошей точностью считается превышение заданных характеристик хотя бы на порядок, выберем длительность импульсов синхронизации равной 1 мкс, таким образом, длительность сформированных сигналов составит 40 ±1 мкс. Так как входной синхросигнал имеет частоту 20 MHz, составим схему деления импульсов на 20, смотри рисунок 5.
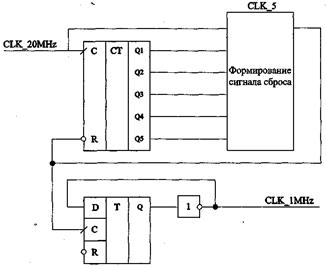
Рисунок 5 - Функциональная схема делителя частоты
На рисунке 5 представлена схема деления частоты на 20. Входной сигнал частотой 20 MHz поступает на синхронизирующий вход пяти разрядного счетчика. Блок CLK 5 осуществляет формирование строба через каждые 10 импульсов синхронизации с длительностью равной 50 нc (20 MHz) Выходные стробирующие импульсы поступают на синхронизирующий вход триггера, результатом работы которого является меандр частотой 1 MHz, смотри рисунок 6.

Рисунок 6 - Временные диаграммы формирователя частоты синхронизации
3.3 Контроль входных сигналов
Алгоритм контроля входных сигналов построен следующим образом: устройство должно осуществлять проверку входящих сигналов на основе данных об расположении импульсов UАВ и UR , положение которых внормальном состоянии должно соответствовать рисунке 7.
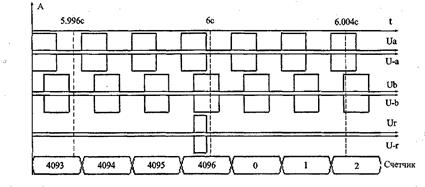
Рисунок 7 - Временные диаграммы расположения входных сигналов
Так как сигнал UR несет в себе информацию о направлении антенны обзорного локатора на СЕВЕР, то его пропадание может вызвать нарушения в работе локатора, таким образом, необходимо осуществлять контроль данного сигнала, и, при возникновении неисправности, сигнализировать обслуживающий персонал о его исчезновении и осуществлять автоматическое переключение на другой оптический датчик, использующийся для резерва.
Согласно ТО на обзорный радиолокатор, скорость вращения антенны является величиной не постоянной и зависит от большого числа факторов таких как: скорость ветра, температура окружающей среды и т.д. Кроме того, при включении привода локатора выход антенной системы в рабочий режим происходит не мгновенно. Все эти факторы влияют на то, что период следования сигнала UR постоянно меняется. Согласно ТО, нормальным режимом работы локатора считается режим, при котором скорость вращения антенны составляет 1 оборот за 6 с.
Сигнал UА несет в себе азимутальную информацию и состоит из набора 4096 импульсов характеризующих изменение угла на 8 минут, поэтому по пришествию импульса UR , необходимо осуществлять их подсчет и сформировать сигнал аварии при несоответствии их числа 4096-ти, а также осуществить переключении на работу от второго оптического датчика, при необходимости.
Так как контролировать сигналы нужно по разным параметрам, целесообразно разделить функцию контроля входных сигналов на два отдельных модуля:
- Модуль SEVER _ 1,
- Модуль MAI _1.
- Модуль SEVER_1