Дипломная работа: Контроллер угловой информации
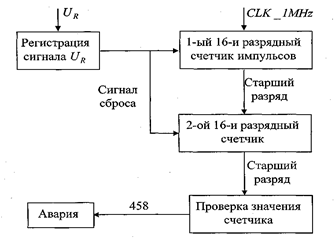
Рисунок 8 - Структурная схема модуля SEVER_1
Модуль SEVER _1 организуем таким образом: Так как скорость вращения антенны локатора не статична будем осуществлять ожидание появления сигнала UR в течение 30 с, что эквивалентно 5-и оборотам антенны при номинальном темпе обзора, составляющем 1 оборот за 6 с. По истечении этого срока будем формировать сигнал УХУДШЕНИЕ, а также сигналы управления датчиками (выключение первого оптического датчика, включение второго оптического датчика). При возникновении невозможности резервирования (вышли из строя 2-а датчика) будем формировать сигнал АВАРИЯ.
Модуль SEVER _1 представляет собой написанную на языке AHDL программу [1]. Заголовок модуля содержит объявленное заранее значение константы Т _ ZAD , несущее в себе информацию о значении до которогодосчитал второй счетчик, и необходимое для быстрого изменения условий работыалгоритма.
Формирование необходимой паузы в 30 с организуем с помощью двух 16-и разрядных счетчиков COUNT _ 1 _ 1 и COUNT _ 2_ 1 на синхронизирующиевходы которых подадим синхроимпульсы частотой 1 МГц для первого и старший разряд первого счетчика - для второго соответственно. Таким образом, для формирование необходимой паузы, второй счетчик должен досчитать до числа 458, при возникновении которого с помощью D триггера D2 _1 формируетсястроб STROB _SEVER _ 1, по которому осуществляется формирование сигналаVCC _ DATCHIK _ 1 , управляющего работой оптического датчика смотри рисунок9 (Здесь, для наглядности, показан один счетчик, и частота синхронизации увеличена в 100 раз). При появлении сигнала UR , счетчики сбрасываются, и цикложидания повторяется заново смотри рисунок 10. Помимо вышесказанного, сигнал управления питанием датчика - VCC _DATCHIK _1 формируется не в любое время (по возникновению STROB _ SEVER _1), а во избежания формирования искаженного импульса, только после окончания действия сигналов UAB и UR , благодаря JKтриггеру D1_1, сброс которого осуществляется сигналом управления WORK смотри рисунок 11. Кроме того, функционирование модуля SEVER _1 осуществляется под воздействием внешних сигналовуправления:
- WORK- Работа,
- USTIROVKA -Юстировка,
- MU - Местное управление.
При включении режима WORK осуществляется нормальная работа схемы и контроль входных сигналов. В режиме USTIROVKA или MU - контроль сигналов не функционирует и режим формирования сигналов УХУДШЕНИЕ и АВАРИЯ не происходит. Помимо этого в режиме USTIROVKA схема автоматически устанавливает сигнал VCC _DATCHIK 1 в положение, соответствующее работе первого оптического датчика.
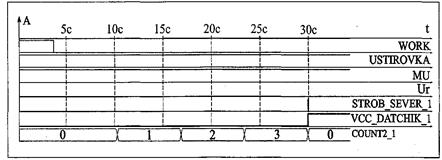
Рисунок 9 - Временные диаграммы формирования сигнала, управляющего питанием первого датчика
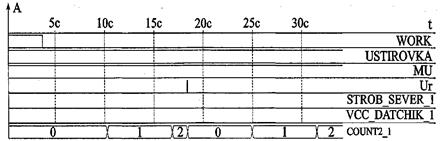
Рисунок 10 - Временные диаграммы сброса счетчиков сигналом UR
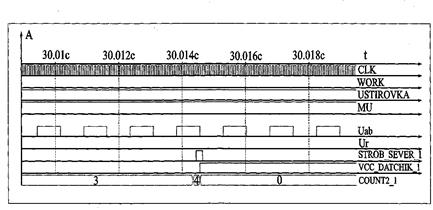
Рисунок 11 - Временные диаграммы формирования сигнала VCC _ DA TCHIK _ 1 по сигналу STROB _ SEVER _1 и UAB
Контроль расположения импульсов UА осуществим иначе:
В паспорте на оптический датчик (ЛИР-158А) сказано о возможности изменения числа импульсов 4096 в переделах ±15 импульсов, то по возникновению данной ситуации будем формировать строб отклонения числа импульсов от заданного. При сильных изменениях в числе импульсов UАв будем формировать сигнал АВАРИЯ, и устанавливать сигнал VCC DATCHIK 1, управляющий работой первого датчика, в положение выключено.
Модуль MAI__1
Структурная схема работы модуля MAI _ 1 представлена на рисунке 12.
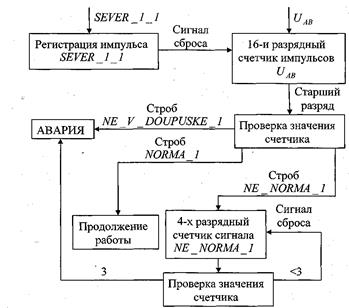
Рисунок 12 - Структурная схема работы модуля MAI _ 1
Модуль MAI _1 представляет собой программу, написанную на языке
AHDL [1] и предназначенную для работы с сигналами, идущими с первого оптического датчика. В заголовке программы добавим обозначения констант.
NUM _ MAI _ МАХ (максимально допустимое число импульсов UАВ ) ,
NUM _ MAI _ NORM (Нормальное число импульсов UАВ ) ,
NUM _ MAI _ MIN (минимально допустимое число импульсов UАВ ).
Изменение данных величин, по необходимости, позволяет быстро осуществить изменение условий работы модуля MAI _1. В качестве основных элементов программы являются два счетчика импульсов:
COUNT 1 _1 - 16-и разрядный счетчик импульсов UАВ .
COUNT 2 1 -4-ех разрядный счетчик стробирующих импульсов