Дипломная работа: Контроллер угловой информации
Так как схема управляется внешними сигналами, и неожиданное переключение может вызвать незапланированное неправильное формирование сигнала ошибки, проверка числа импульсов UАВ осуществляется во время прихода второго импульса UR , в результате чего происходит формирование строба NORMA _ 1 , если число импульсов соответствует 4096-и, NE _ NORMA _ 1 , если число импульсов U АВ лежит в допустимых пределах и NE_V_ DOPUSKE_1 , если их число выходит за значения, указанные в разделе констант, смотри рисунок 13. При работе схемы под воздействием управляющих сигналов ЮСТИРОВКА, MU_D1 или MU_D2, последние два действительны только при наличии дополнительного сигнала, включающего режим местного управления, схема контроля входных сигналов модуля MAI _1 прекращает свою работу и устройство не реагирует на возникновение каких-либо нарушений в работе оптических датчиков.
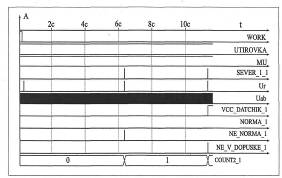
Рисунок 13 - Временные диаграммы работы модуля MAI _1
Как видно из рисунка 13, счетчик считает стробирующие импульсы NE_NORMA_1, появление же импульса NE_V _DOPUSKE_1 вызывает немедленное формирование сигнала VCC_DATCHIK _1 . При возникновении импульса NORMA _ 1 происходит сброс счетчика, и работа схемы продолжается смотри рисунок 14. (Здесь, для наглядности восприятия, показана работа только второго счетчика)
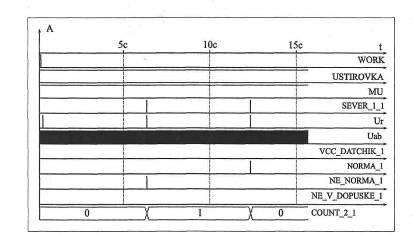
Рисунок 14 - Временные диаграммы сброса счетчика по сигналу NORMA_1
При появлении подряд трех стробирующих импульсов NE_NORMA _1 происходит формирование сигнала VCC _DATCHIK_ 1 и переключение на работу от второго оптического датчика.
3.4 Блок PR_SEVER_1
Работа модуля MAI _1 была бы невозможна без специально написанного дополнительного блока PR_SEVER_1, осуществляющего пропуск первого импульса UR , по переключению схемы из одного режима работы в другой смотри рисунок 15.
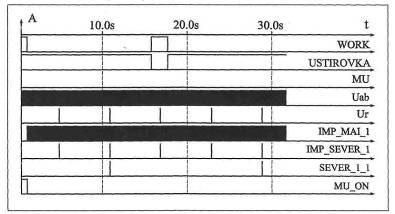
Рисунок 15 - Временные диаграммы работы блока PR_SEVER_1
Как видно из рисунка 15, сигналы переключения режимов WORK-USTIROVKA приводят к сбросу формирователя последовательности SEVER_1_1, организованного на триггерах d1 _1 и d2 _1 . На синхронизирующие входы, которых поданы сигналы U R , и не-U R соответственно. Сброс триггеров осуществляется подачей на их входы CLRN сигналов управления - WORK и USTIROVKA .
При работе схемы в режиме не-WORK последовательность импульсов SEVER _1 _1 полностью совпадает с последовательностью UR
Сигнал MU_ON предназначен для передачи информации о необходимости работы первого датчика в блок MAI _1 и SEVER _1. Как видно из рисунка 15, во время включения режима USTIROVKA, сопровождающегося выключением режима WORK, сигнал разрешение работы первого датчика не отключается, что связано с необходимостью работы в этом режиме обоих датчиков. Сигналы IMP_MAI__1 и IMP SEVER _1 сформированы под воздействием внешних управляющих сигналов, указанных выше и являются копиями последовательностей сигналов UАВ и UR .
3.5 Блок DATCHIK_1
Структурная схема блока DATCHIK _1 представлена на рисунке 16.
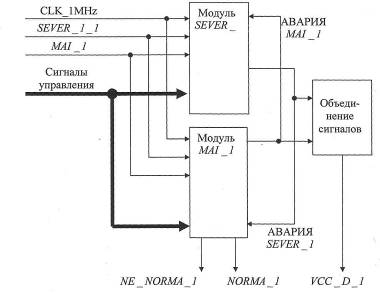
Рисунок 16 - Структурная схема работы блока DATCHIK _1
Данный блок предназначен для работы с модулями MAI _ 1 и SEVER _ 1 и осуществляет передачу управляющих сигналов из одного модуля в другой, создавая, таким образом, возможность выключения модуля при появлении в другом - внутреннего сигнала аварии. Режим передачи внутренних сигналов состояния осуществляется при помощи сигналов VCC _ SEVER_1 и VCC_МAI _1 для модулей MAI и SEVER соответственно. Результатом работы блока DATCHIK_1 являются сформированные сигналы VCC__D_1, NORMA _1 и NE _ NORMA __ 1 , назначение которых приведено ниже:
-VCC_D_1 несет в себе информацию о результате работы модулей MAI_ 1 и SEVER _ 1 . (Сигнал с активным низким уровнем).
-NORMA _1 - строб импульс, показывающий, что при повороте антенны локатора на 360°, число импульсов UАв первого оптического датчика соответствует 4096-ти.
-NE _NORMA _1 - строб импульс, показывающий, что при повороте антенны локатора на 360°, число импульсов UАВ первого оптического датчика отклонилось от номинального значения на допустимую величину.
3.6 Функции управления резервным оптическим датчиком
Организация работы второго оптического датчика построим по аналогичной с первым датчиком схеме. Контроль входных сигналов UАВ и UR , идущих с резервного оптического датчика, возложим на модули MAI _2 ,
SEVER _ 2 и блок управления DATCHIK _2. Режим работы блока
PR _ SEVER 2 создадим отличным от PR _ SEVER _1 , так как второй датчик в режиме WORK, при нормальном функционировании первого, должен быть отключен. Для этого, помимо вышеуказанных сигналов, характерных PR SEVER 1, введем дополнительный входной сигнал VCC __DATCHIK _1, идущий с блока DATCHIK_1 и осуществляющий разрешение формирование последовательностей IMP _МА1 _2 и IMP _ SEVER _ 2 по импульсам идущим со второго оптического датчика.
Таким образом, при одновременной работе PR _SEVER _1 , DATCHIK _1 и PR SEVER_2, DATCHIK _2 в режиме WORK осуществляется работа с первым датчиком, а при возникновении неисправности (формирование сигналов АВАРИЯ модулями MAI _1 или SEVER _1), происходит автоматическое
переключение на работу и прием сигналов от резервного датчика. При возникновении ошибок в работе второго датчика (формирование сигналов АВАРИЯ модулями MAI_2 или SEVER 2) происходит формирование общего сигнала АВАРИЯ и работа схемы останавливается.
При переключении режима работы схемы с WORK на USTIROVKA или на MU вышеуказанными модулями происходит автоматическая установка внутренних сигналов управления оптическими датчиками в положение, соответствующее включенному состоянию и осуществляется выключение схем контроля за параметрами принимаемых импульсов.