Дипломная работа: Модернизация приемной коробки станка СТБ 2-250
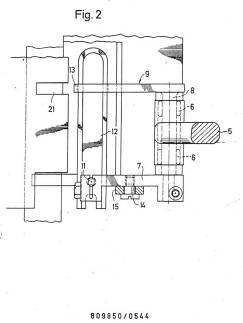
Рис. 8б
1.6 ИССЛЕДОВАНИЕ МЕХАНИЗМА УКЛАДКИ ПРОКЛАДЧИКОВ НА ТРАНСПОРТЕР
1.6.1 КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА
Механизм предназначен для укладки прокладчиков, находящихся в направляющих приемной коробки, на транспортер.
К особенностям работы механизма следует отнести укладку прокладчиков в шаге (254 мм) между гонками транспортера, независимо от заправочной ширины станков. Это достигается смещением начала работы механизма посредством поворота спаренных кулаков его привода относительно главного вала станка. Для этого на станках СТБ в зависимости от начала боя 105 град, или 140 град, установлены следующие углы работы механизма - 49 град. , 150 град. , 260 град, и 60 град. , 170 град. , 280град., соответственно.
Опыт эксплуатации станков СТБ показывает, что механизм очень чувствителен к зазорам и требует тщательной регулировки. Незначительные отклонения в исходном положении толкателя по сравнению с тем, которое указано в инструкции по эксплуатации, связанные с наличием зазоров в шарнирных соединениях, приводят к нарушению работы механизма и, как следствие, к останову станка.
Кроме того, при повышении скоростного режима станков СТБ в процессе эксплуатации выявился износ щеколды, выступов толкателей, планки транспортера, а также отскок прокладчика при укладке его на транспортер.
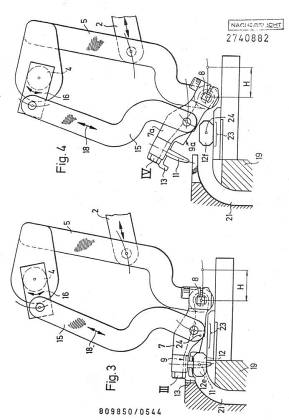
Исследование механизма проводилось аналитическим методом с целью более точного нахождения кинематических характеристик движения и условий взаимодействия движущегося толкателя с неподвижным прокладчиком. В качестве исходных данных принималась расчетная конструкторская документация на указанный механизм.
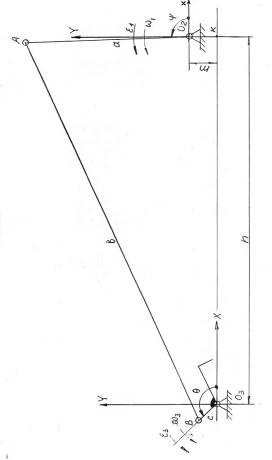
Кинематическая схема механизма приведена на рис. 9. Механизм О2 АВO3 представляет собой двухкоромысловый механизм с приводом коромысла О2 А от спаренных кулаков, расположенных на главном валу станка.
При исследовании подобных сложных по структурным схемам механизмов обычно используют метод припасовки. Следуя этому методу, сложный механизм представляется в виде простых механизмов, соединяемых последовательно.
При этом выходные кинематические характеристики конечного звена первого механизма являются входными характеристиками второго механизма и т.д.
Используя метод припасовки, представим схему механизма укладчика в виде двух простейших механизмов рис. 10, рис. 11 -кулачкового с качающимся коромыслом - звено АО2 D и четырехзвенного механизма –O2 ABO3 .
Рассмотрим схему кулачково-коромыслового механизма O1 DO2 A, где OD - теоретический радиус-вектор кулака, aAO2 D - коромысло (рис. 10) и составим основные аналитические зависимости для угла поворота, скорости и ускорения коромысла в функции радиус-вектора кулака. Подобные зависимости необходимы для проведения анализа работы механизма, так как радиус-векторы кулака заданы в табличной форме.
На рис. 10 показаны два положения коромысла AO2 D (начальное) и A1 O2 D1 при повороте кулака на угол, соответствующий радиус-вектору RTKI .
О2 D1 = 74,5
О2 D2 = 74,5
О2 А = 92
АВ = 240,812
О3 В = 12
α = 60,75˚
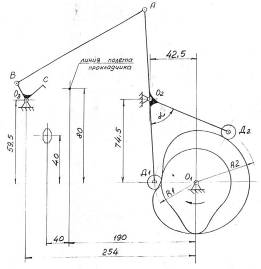
Рис. 9 Кинематическая схема механизма укладчика прокладчика на траспортер.
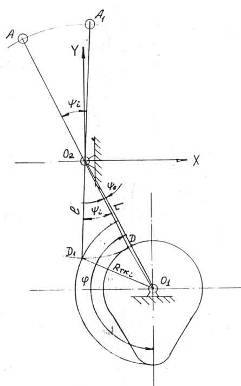
Рис. 10
Обозначим межцентровое расстояние О1 О2 через L радиус-вектор кулака через RTKi , длину коромысла O2 D через l, начальный угол, определяющий положение коромысла, через Y0 , а текущий угол поворота коромысла через Y1 , угол поворота кулака через φ.
Из известных соотношений между углами и сторонами в треугольнике можно записать: