Дипломная работа: Проектирование цифрового регулятора для электропривода с фазовой синхронизацией
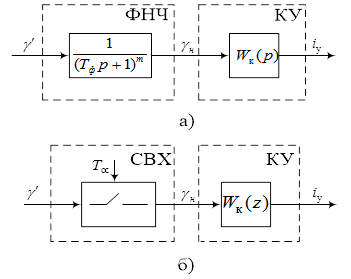
Рисунок 1.8 - Модели демодуляторов.
Благодаря демодуляции выходного сигнала импульсного частотно-фазового дискриминатора обеспечивается качественная фильтрация выходного сигнала ИЧФД γ и отсутствие высокочастотных пульсаций в управляющем сигнале ![]() , формируемом в соответствии с передаточной функцией корректирующего устройства КУ
, формируемом в соответствии с передаточной функцией корректирующего устройства КУ ![]() .
.
Модель БДПТ (при синусоидальной форме токов и их фазовом сдвиге на ![]() в обмотках электродвигателя) приведена на рисунке 1.9, где
в обмотках электродвигателя) приведена на рисунке 1.9, где ![]() - максимальная величина потокосцепления постоянных магнитов ротора с обмотками БДПТ,
- максимальная величина потокосцепления постоянных магнитов ротора с обмотками БДПТ, ![]() - электромагнитный момент электродвигателя,
- электромагнитный момент электродвигателя, ![]() - момент нагрузки на валу электродвигателя,
- момент нагрузки на валу электродвигателя, ![]() - момент инерции ротора БДПТ с нагрузкой, ε - угловая скорость, ω - угловая скорость. При этом при различных способах демодуляции выходного сигнала ИЧФД
- момент инерции ротора БДПТ с нагрузкой, ε - угловая скорость, ω - угловая скорость. При этом при различных способах демодуляции выходного сигнала ИЧФД
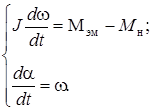 (1.1)
(1.1)
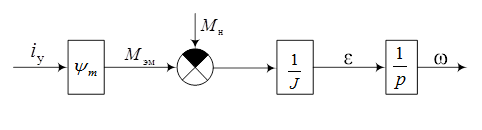
Рисунок 1.9 - Модель БДПТ
Коэффициент передачи импульсного датчика частоты вращения ИДЧ равен ![]() (рисунок 1.10).
(рисунок 1.10).
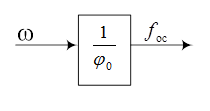
Рисунок 1.10 - Модель ИДЧ
Объединяя приведенные модели отдельных узлов электропривода, в [1] получены две структурные схемы контура ФАПЧВ при различных способах демодуляции выходного сигнала ИЧФД γ (рисунок 1.11а и 1.11б).
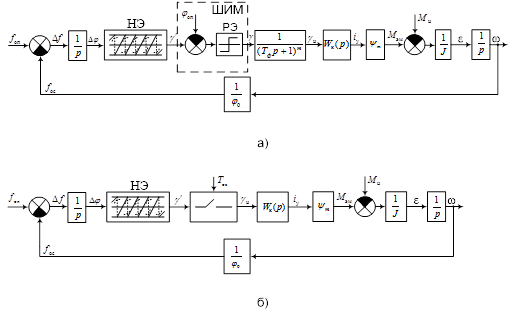
Рисунок 1.11 - Полная схема контура ФАПЧВ
Наличие в структурной схеме электропривода нелинейного элемента НЭ позволяет рассматривать электропривод с фазовой синхронизацией как систему с переменной структурой. Для анализа динамических процессов в таком электроприводе в [1] выделяются режимы работы, в которых структура системы регулирования остается неизменной, и проводится анализ динамики электропривода в каждой из этих областей.
В зависимости от рабочего участка НЭ в [1] выделяются три режима работы электропривода:
1. Режим насыщения импульсного частотно-фазового дискриминатора при разгоне электропривода (f оп >f ос ). Выходной сигнал ИЧФД ![]() является непрерывной функцией и не зависит от входного сигнала
является непрерывной функцией и не зависит от входного сигнала ![]() . Происходит разгон электродвигателя с максимальным ускорением εm (если пренебречь моментом
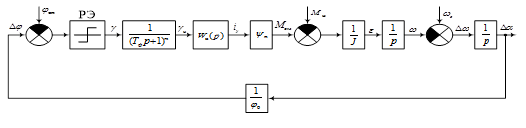
. Происходит разгон электродвигателя с максимальным ускорением εm (если пренебречь моментом ![]() на валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием (рисунок 1.12а, где
на валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием (рисунок 1.12а, где ![]() ,
, ![]() - ошибки регулирования по углу и угловой скорости).
- ошибки регулирования по углу и угловой скорости).

а)
б)
в)
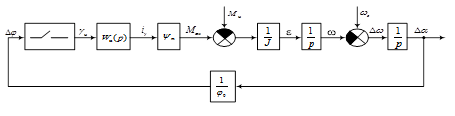
Рисунок 1.12 - Структурные схемы электропривода:
а) режим насыщения; б) в линейном режиме (в качестве демодулятора используют ФНЧ); в) в линейном режиме (в качестве демодулятора используют СВХ)
2. Режим фазового сравнения ИЧФД соответствует пропорциональному режиму работы электропривода (f оп =f ос ). Работа электропривода происходит на линейном участке характеристики НЭ. Неоднозначность нелинейного элемента и насыщение в этом режиме можно не учитывать. В результате НЭ заменяется линейным звеном с коэффициентом передачи, равным единице, и структурная схема контура ФАПЧВ (рисунок 1.11) преобразуется в схему, приведенную на рисунке 1.12 б.
В этом режиме работы электропривода, при выполнении условий линеаризации нелинейных элементов, входящих в состав фазового дискриминатора и демодулятора, система управления (рисунки 1.12 б и 1.12 в) могут быть приведены к линейной системе автоматического регулирования, представленной на рисунке 1.13. Фильтр нижних частот в этой схеме исключен, так как его постоянная времени обычно выбирается из условия ![]() , где
, где ![]() , ωс - частота среза замкнутой линеаризованной системы регулирования, поэтому он практически не оказывает влияния на процессы в электроприводе, и им можно пренебречь.
, ωс - частота среза замкнутой линеаризованной системы регулирования, поэтому он практически не оказывает влияния на процессы в электроприводе, и им можно пренебречь.
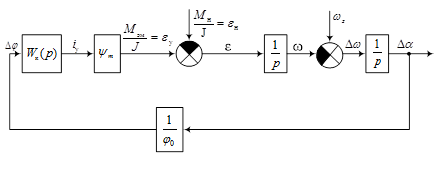
Рисунок 1.13 - Линеаризованная структурная схема электропривода в пропорциональном режиме работы.
3. Режим насыщения импульсного частотно фазового дискриминатора при торможении электропривода (f оп <f ос ). Выходной сигнал ИЧФД ![]() непрерывен и зависит от входного сигнала
непрерывен и зависит от входного сигнала ![]() . Происходит торможение электродвигателя с максимальным ускорением εm (если пренебречь моментом
. Происходит торможение электродвигателя с максимальным ускорением εm (если пренебречь моментом ![]() на валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием (рисунок 1.12 а).
на валу электродвигателя). Структурная схема электропривода в этом режиме работы преобразуется в структурную схему разомкнутой системы регулирования с постоянным задающим воздействием (рисунок 1.12 а).