Дипломная работа: Проектирование воздушно-динамического рулевого привода управляемой гиперзвуковой ракеты зенитного
α, αm - угол поворота и максимальный угол поворота якоря управляющего электромагнита;
α, αу - коэффициенты, характеризующие регулируемое истечение.
Структурная схема исполнительного механизма будет иметь следующий вид:
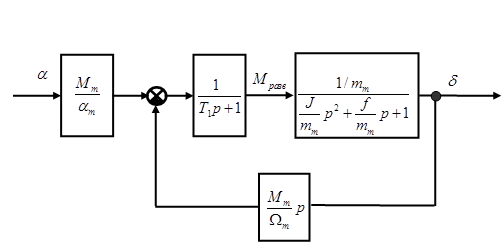
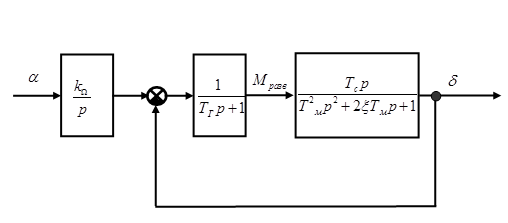
Рис 1.3.2 Структурная схема исполнительного механизма.
1.4 Расчет первоначального варианта ВДРП
Проанализируем диапазон чисел Маха на участке управляемого полета:
М= 1,1÷Кб;
В таблице 1.1 отражена зависимость коэффициента ![]() от чисел Маха:
от чисел Маха:
Таблица 1.1
| Мах | 1,1 | 2 | 3 | 4 | 5 | 6 |
| 1,45 | 1,45 | 1,4 | 1,3 | 1,2 | 1,1 |
Значения коэффициента подъемной силы cn = f (M, αэф ) и относительного положения центра давления xd = f (αэф , М) приведены, соответственно, в таблицах 1.2 и 1.3
Таблица 1.2 коэффициент сп
| 1,1 | 2 | 3 | 4 | 5 | 6 | |
| 5° | 0,2523 | 0,22 | 0,156 | 0,126 | 0,111 | 0,101 |
| 10° | 0,5046 | 0,44 | 0,312 | 0,252 | 0,222 | 0,202 |
| 15° | 0,7569 | 0,66 | 0,468 | 0,378 | 0,333 | 0,303 |
| 20° | 0,0092 | 0,88 | 0,624 | 0,504 | 0,444 | 0,404 |
| 25° | 1,261 | 1,1 | 0,78 | 0,63 | 0,555 | 0,505 |
| 30° | 1,5138 | 1,32 | 0,936 | 0,756 | 0,666 | 0,606 |
| 35° | 1,766 | 1,54 | 1,092 | 0,882 | 0,777 | 0,707 |
| 40° | 2,0188 | 1,76 | 1,248 | 1,008 | 0,888 | 0,808 |
| 45° | 2,2707 | 1,98 | 1,404 | 1,134 | 0,999 | 0,909 |
| Таблица | 1.3 | центр давления | xd (мм) | |||
| 1,1 | 2 | 3 | 4 | 5 | 6 | |
| 0° | 53 | 55 | 54,6 | 54,1 | 53,4 | 52,8 |
| 5° | 53 | 54,75 | 54,5 | 54 | 53,4 | 52,8 |
| 10° | 53 | 54 | 54 | 53,5 | 53,4 | 52,8 |
| 15° | 53 | 53 | 53 | 53 | 53,4 | 52,8 |
| 20° | 53 | 52,5 | 52,5 | 53 | 53,4 | 52,8 |
| 45° | 53 | 52,5 | 52,5 | 53 | 53,4 | 52,8 |
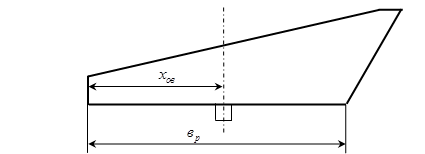
Выбираем положение оси вращения руля:
Хов = (0,05 ÷ 0,1) - (Xdmax - Xdmin ) + Xdmin
Значение хов = 52 мм
Рассчитаем значения шарнирных нагрузок по зависимости:
![]() (1.4.2)
(1.4.2)
где
q = 0,725 М2 ;
вр - аэродинамическая хорда; вр = 86 мм;
Sxap - площадь сечения ракеты; S xap = 28,27 см2;
сп - коэффициент подъемной силы;
xd - относительное положение центра давления;
Значения шарнирных нагрузок приведены в таблице 1.4
Таблица 1.4
значения шарнирных нагрузокМн [кгсм]
| 1,1 | 2 | 3 | 4 | 5 | 6 | |
| 5° | -0,6257 | -4,9599 | -7,1970 | -8,2639 | -7,9626 | -5,9618 |
| 10° | -1,2514 | -7,2145 | -11,5104 | -12,3958 | -15,9252 | -11,9236 |
| 15° | -1,8771 | -5,4108 | -8,6328 | -12,3958 | -23,8878 | -17,8854 |
| 20° | -2,5028 | -3,6027 | -5,7552 | -16,5278 | -31,8504 | -23,8452 |
| 45° | -5,6313 | -8,1163 | -12,9492 | -37,1875 | -71,6634 | -53,6562 |
Зависимость шарнирных нагрузок от чисел Маха и от эффективных углов ![]() приведены на рисунке 1.4.1.
приведены на рисунке 1.4.1.