Дипломная работа: Разработка системы для моделирования радиолокационной обстановки, которая бы позволила получать файлы на персональной ЭВМ, содержащие цифровое представление радиолокационной обстановки
6.3 Анализ технико-экономической эффективности
Заключение
Список сокращений
Литература
Приложения
1 Структура пакета данных на 2 листах ф. А4
2 Заголовочный файл для реализации математических моделей на 4 листах ф. А4
3 Графическая часть на 8 листах ф. А1
Введение
Постоянно растущая интенсивность полетов и увеличение числа гражданских рейсов воздушного транспорта требуют более широкого внедрения радиоэлектронных средств для обеспечения управления воздушным движением, навигации и посадки. Безопасность и регулярность полетов самолетов в значительной степени зависит от состава оборудования, рациональной компоновки и его безотказной работы. Для контроля местоположения самолета на трассе применяются наземные радиолокационные станции (РЛС).
При проектировании и разработке РЛС в целом или отдельных модулей встает задача выбора параметров и режимов работы, проверка работоспособности и отладка разрабатываемого изделия.
В реальных условиях для проверки работоспособности всей РЛС или отдельного модуля необходимо осуществить выезд на испытательный полигон, предварительно договорившись с руководством специализированной летной организации на проведение тренировочных полетов в заданном районе по заданным траекториям.
Очевидно, что при таком подходе стоимость разработки заметно увеличивается. Увеличиваются также сроки разработки, поскольку изготовление и доработка тестируемых блоков и модулей требует дополнительного времени и людских ресурсов. В случае обнаружения неустранимых ошибок в конструкции изделия из-за неправильного выбора параметров или режимов работы зачастую требуется повторное изготовление всего блока или модуля.
Темой данной дипломной работы является разработка системы для моделирования радиолокационной обстановки, которая бы позволила получать файлы на персональной ЭВМ, содержащие цифровое представление радиолокационной обстановки. Данные файлы могут быть использованы для проверки корректности работы реальных устройств обработки принимаемых радиолокационных сигналов, реализуемых на программируемых логических интегральных схемах и цифровых сигнальных процессорах.
Создание подобной системы позволит проводить испытание, проверку и настройку опытных образцов схем и устройств непосредственно на месте разработки, без выезда на испытательный полигон, что позволит снизить затраты на разработку.
Поскольку станет возможным создание практически любой радиолокационной обстановки, то можно будет промоделировать самую критическую в плане обнаружения цели обстановку и проверить работу оборудования в этом режиме.
Данную систему можно также применять как макет для обучения студентов радиотехнических специальностей вузов основам радиолокации и последующей обработки информации.
Подобная система не имеет аналогов и является новым перспективным изделием в рамках моделирования процессов радиолокации и обработки принимаемых радиолокационных сигналов.
1 Постановка задачи
1.1 Основные понятия
Прежде чем описывать работу и назначение программного комплекса введем основные понятия и определения, необходимые для знакомства с данной предметной областью и понимания основных идей, заложенных при разработке программного комплекса.
Радиолокация – это область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, т.е. их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС). Сами же объекты радиолокационного наблюдения именуются радиолокационными целями.
Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения.
1. Радиолокация с пассивным ответом, основанная на том, что излучаемые РЛС колебания – зондирующий сигнал – отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала или эхо-сигнала. Важным требованием к целям в этом случае является отличие от отражающих свойств окружающей среды.
2. Радиолокация с активным ответом, характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специального ответчика – ретранслятора. При этом заметно повышается дальность и контрастность радиолокационного наблюдения, что позволяет использовать данный вид радиолокации для наблюдения радиолокационных целей на больших расстояниях, а также искусственных спутников Земли.
3. Пассивная радиолокация основана на приеме собственного радиоизлучения целей, преимущественно миллиметрового и сантиметрового диапазонов.
Основными составными частями РЛС являются приемник, передатчик, антенное устройство и оконечное устройство.
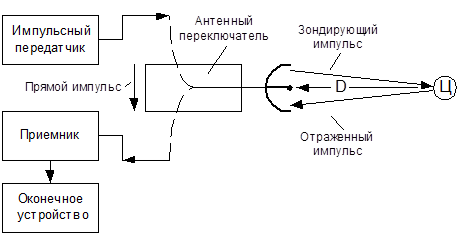
Рисунок 1.1 – Структурная схема простейшей импульсной РЛС
У большинства РЛС приемная и передающая антенны расположены в непосредственной близости друг от друга, а РЛС с импульсной модуляцией (наиболее широко используемые в настоящее время) обычно имеет одну антенну, снабженную специальным антенным переключателем для перехода из режима передачи в режим приема и обратно (рисунок 1.1). В импульсных РЛС антенный переключатель содержит разрядники защиты приемника и блокировки передатчика, которые коммутируют антенну либо с передатчиком, либо с приемником.
Передатчик РЛС вырабатывает высокочастотные колебания, которые модулируются по амплитуде, частоте или фазе иногда весьма сложным образом. Эти колебания передаются в антенное устройство и образуют зондирующий сигнал.